



在对并联机构的研究中,以六自由度(Stewart)和三自由度(Delta)机构为主,并出现了较多的衍生机构,而对四自由度这样的少自由度机构研究较少。且在工业生产中,通常需要机器人完成的是抓取-放置动作,需要机器人能够在空间自由移动并加上一定方向和角度的转动,而这样的运动无须六自由度也可完成,但三自由度又不能满足使用需要,这样,四自由度机器人的地位就得以凸显。一些学者基于不同理论提出了一些四自由度并联机器人[1-3],Angeles[4]Kong和Gosselin[5]Gogu[6]Salgado等[7]对这些机构进行了系统的分类。但其中大多数都存在过约束,不能满足Grübler/Kutzbach公式,且由于过约束机构对装配条件的苛刻要求,使得这类机构在运动形式和精度实现方面都受到限制。
由此,Pierrot和Company等提出了一种被称为H-4的四自由度并联机构[8-10],这也是第1种非过约束的四自由度并联机构,能够实现三平动一转动的运动形式。Rolland提出了2种被用于物料输送的四自由度并联机构,分别名为Kanuk和Manta[11]。Krut等提出了基于H-4设计的I-4机构[12-14]。以上几种都是非过约束的四自由度并联机构,但是这些机构在支链形式上都与Delta机构相类似。
Guo等提出了一种设计非过约束四自由度(3T1R)并联机构的构型综合方法[15],解决了驱动和约束的冲突,实现了三平动一转动机构的设计综合方法,但机构所输出的转动运动十分有限,不能充分满足工业生产的需要。
本文提出了一种新型2-2PRUR并联机构,在诸如Delta机构等传统少自由度机构实现三平动自由度的基础上增加了转动自由度,更好地适应了实际生产线的需要。在动平台部分加入行星轮系以增大机构转动自由度的转角,解决四自由度(3T1R)机构转角过小的问题,并同时消除过约束。采用非对称构型增大工作空间体积以适应工业生产线抓取-放置操作需求,并进行了自由度、运动学正反解、工作空间分析求解及体积优化,对推动此类机器人的应用起重要作用。
1 机构的提出及自由度分析 1.1 新型并联机构动平台的构建设一可实现三平动自由度的刚性动平台如图 1(a)所示,此时该动平台处于过约束状态。如图 1(b)把动平台分为Ⅰ和Ⅱ两部分,并命名为副动平台,则这2个副动平台就分别拥有3个方向的平动自由度,且通过副动平台的相对移动可以获得1个转动自由度。Pierrot等[8]把这2个平台的连接方式总结为3种:双转动副连接、齿轮齿条连接、滑轮带轮连接,以此来输出两平台之间的转动自由度。本文以齿轮齿条和移动副结合的方法连接两副动平台,并称连接副动平台的齿轮为中心齿轮,如图 1所示,其中θ为中心齿轮转动角度。至此,整个动平台成为了一个拥有三平动自由度的整体,同时拥有轴线与自身平面垂直的转动自由度。

|
| 图 1 动平台拆分过程 Fig. 1 Moving platform split process |
由于动平台整体的转动自由度是由副动平台之间相对移动得来,因而转动速度较小,且转动幅度也受到很大限制。本文在副动平台齿轮齿条连接处下方加入一组行星轮系机构,轮系结构如图 2所示,中心齿轮作为输入齿轮,由2个副动平台上的齿条相对移动来驱动,恒星齿轮1固结在中心齿轮上,恒星齿轮3固结在中心齿轮转动轴上,以恒星轮和行星轮转动中心的连接行架作为输出端,称为主动平台。这样整个机构即可输出包括3个平动自由度、1个高速大转角转动自由度的四自由度运动。最终动平台结构如图 3所示。

|
| 图 2 行星轮系结构示意图 Fig. 2 Schematic diagram of planetary gear train structure |

|
| 图 3 动平台结构示意图 Fig. 3 Schematic diagram of moving platform structure |
根据上述思想,提出2-2PRUR并联机构构型如图 4所示。2-2PRUR并联机构含4条支链,每条支链由4个运动副组成,从定平台到动平台的运动副分别为P-R-U-R,定平台4组滑轨顶点组成1个正四边形,并设其边长为a,滑轨轴线呈铅垂布置。各滑块与支链连接的转动副轴线分别与各自所在滑轨轴线垂直。设hij表示第i支链中的第j根杆,其中h11和h41的转动面分别在滑轨1、2和2、4所组成的平面内。h21和h31的转动面在滑轨2、3所组成的平面内。h12和h42与动平台连接的转动副轴线都垂直于动平台所在平面。h22与h32和动平台连接的转动副轴线互相平行,且都平行于支链所在滑轨所组成的正四边形对角平面。设定坐标系O-xyz原点固结于滑轨1的顶点,z轴方向与滑轨轴线方向平行,x、y轴方向与滑轨顶点所组成的正四边形边长方向平行。点Ai为支链中P副与第1个R副所在点,Bi为支链中U副所在点,Ci为支链中第2个R副所在点,i=1,2,3,4,故 









|
| 图 4 2-2PRUR机构及其简图 Fig. 4 2-2PRUR mechanism and its diagrams |

|
(1) |
式中:d=6-λ为机构的阶数,λ为机构的公共约束数;n为机构总构件数;g为机构总运动副数;fi为第i个运动副的自由度数目;ζ为机构中可能存在的局部自由度数目;v=t-k为除去机构公共约束后的独立冗余约束数目,t为除去公共约束后剩余的约束螺旋数,k为除去公共约束后剩余约束螺旋所构成螺旋系的秩。
这里,将机构运动副表示为螺旋$=(S; S0),S为运动副轴线的单位矢量,S0=n×S为从原点到轴线的矢径n与S的叉乘积。在三维空间中,线性无关的螺旋数为6,当螺旋系的线性无关螺旋数n′ < 6时,就存在6-n′个反螺旋,与所有运动螺旋相逆,使反螺旋$r与运动螺旋$的互易积为零,$r为作用在构件上的力螺旋,这时,$r对运动不做功,是约束反力。
本节通过对比分析4PRUR并联机构与2-2PRUR并联机构的自由度,对本文所提出的2-2PRUR并联机构自由度和非过约束特性进行了验证。
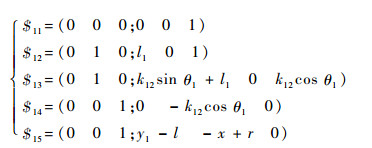
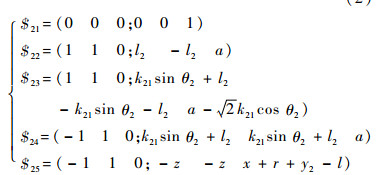
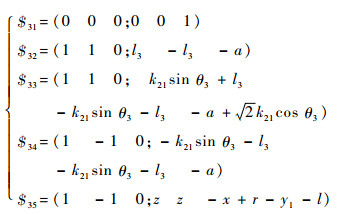
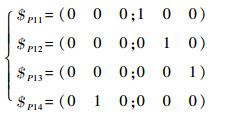
1.3.1 4PRUR并联机构自由度分析当把2-2PRUR并联机构的2个副动平台看作一体时,即4条运动支链带动一个刚性动平台,构型示意如图 5(a)所示,根据结构可命名为4PRUR并联机构。第1~第4分支中从定平台到动平台的5个运动副的运动螺旋在基坐标系中可分别描述为式(2)~式(5),其中:i=1, 2, 3, 4。
|
(2) |
|
(3) |
|
(4) |

|
(5) |

|
| 图 5 4PRUR与2-2PRUR机构构型简图 Fig. 5 4PRUR and 2-2PRUR mechanism configurations' diagrams |
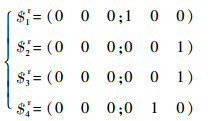
求解式(2)~式(5) 的反螺旋,则这4条支链螺旋系的约束螺旋分别为
|
(6) |
由此可见这4条运动支链分别对所假设的刚性动平台施加了沿x、y、z轴的约束力偶,且约束螺旋数为4,约束螺旋系的秩为3。代入自由度计算公式(1),则有d=6, t=4, k=3, ζ=0, 4PRUR并联机构的自由度Ma=6×(14-16-1)+20+4-3-0=3。故所假设的刚性动平台存在一个冗余约束,4PRUR并联机构为过约束机构,能实现沿x、y、z轴3个方向的平动。
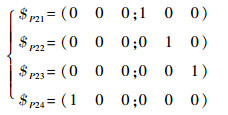
1.3.2 2-2PRUR并联机构自由度分析如图 1所示拆分动平台为2个副动平台,并用齿轮齿条和移动副连接,此时的机构结构简图如图 5(b)所示,2个副动平台P1、P2(为便于分析,这里使用副动平台中点指代对应的副动平台)分别连接支链1、3和支链2、4,故命名此时的机构为2-2PRUR并联机构。支链1~4的运动螺旋及反螺旋仍如式(2)~式(6) 所示,当不考虑2个副动平台之间的连接时,P1和P2的运动螺旋可分别由求解$1r与$r3、$2r与$4r的反螺旋得到,如式(7)、式(8) 所示。
|
(7) |
|
(8) |
$Pab(a=1, 2;b=1, 2, 3, 4) 的形式说明当动平台被拆分且未连接时,在支链的作用下,副动平台P1可实现沿x、y、z轴的移动和沿y轴的转动,副动平台P2可实现沿x、y、z轴的移动和沿x轴的转动。
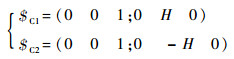
当考虑副动平台之间的连接时,由于连接方式采用了齿轮齿条和移动副结合的形式,连接部分的运动副可以等效为旋向沿中心齿轮转动轴线方向,节距方向沿齿条节线方向、大小为H的螺旋副,则2个副动平台上等效螺旋副的运动螺旋可写为
|
(9) |
通过求解式(7) 与$C1、式(8) 与$C2的反螺旋,可得到新型动平台的约束螺旋:
|
(10) |
由式(10) 的形式可知,4条支链和副动平台之间的齿轮齿条/移动副组合对新型动平台施加了2个约束力偶,分别与x轴和y轴同向,约束了动平台沿x轴与y轴的转动。新型动平台约束螺旋数为2,约束螺旋系的秩也为2,代入自由度计算公式(1),有:d=6, t=2, k=2, ζ=0, 则2-2PRUR并联机构输出端的自由度Mb=6×(16-18-1)+22+2-2-0=4。故所提出的2-2PRUR并联机构不存在公共约束和冗余约束,为非过约束机构,可实现沿x、y、z轴的平动和沿z轴的转动。
2 机构运动学分析 2.1 2-2PRUR并联机构分析模型建立根据1.2节内容,写出P、P1、P2点坐标P(x, y, z),P1(x-r, y1, z),P2(x+r, y2, z),其中:x、y、z为P点沿3个方向的坐标值,y1、y2分别为P1、P2的纵坐标值。当2个副动平台在y方向产生相对位移时,中心齿轮可以得到一个角度为θ的转动,则有
|
(11) |
写出各支链A、C点坐标:

|
设D为中心齿轮的齿距,则中心齿轮转过的齿数为:Z′=Y/D,其中:

|
(12) |
设中心齿轮总齿数为Z,则动平台姿态角θ可表示为
|
(13) |
首先分析杆2、3,写出B2、B3点坐标:
|
其中:θ2、θ3的三角函数值可通过联立式(14)、式(15) 求得。对于支链2、3,有

|
(14) |

|
(15) |
对于杆1、4,写出B1、B4点坐标:
|
其中:θ1、θ4的三角函数值可根据位置关系写出。对于支链1、4,有

|
(16) |
式(14)~式(16) 中,xM、yM、zM表示M点在3个方向上的坐标值,M=A、B、C。
将各点坐标代入式(15)、式(16) 并同时代入所求得的三角函数值,可得出2-2PRUR机构杆长约束方程,其中i=2, 3;j=1, 4:

|
(17) |
已知输出件的位姿,求解输入件的位置称为机构的反解[18]。对于2-2PRUR机构来说,求位置反解的过程即为已知动平台中心点坐标P(x, y, z)和动平台姿态角θ求输入(l1, l2, l3, l4)的过程,其中

通过机构杆长约束方程(17) 可得

|
(18) |
式(18) 即为4个驱动变化规律的表达式。
2.4 运动学位置正解该2-2 PRUR机构的运动学正解问题可描述为:已知主动件驱动(l1, l2, l3, l4),求动平台的位置(x, y1, y2, z)。由位置反解表达式可以得到有关(x, y1, y2, z)4个未知数的方程组:

|
(19) |
式(19) 即为该并联机构的运动学正解模型。联立式(19) 中的4个方程,得到关于(x, y1, y2, z) 4个未知数的高次非线性方程组。
2.5 位置正反解计算实例先假设机构各杆长150 mm,滑轨顶点所组成的正方形边长300 mm,副动平台长(即 

| mm | |||||||
| x | y1 | y2 | z | l1 | l2 | l3 | l4 |
| 160 | 100 | 200 | -150 | 106.0144 | 66.5415 | 21.0464 | 95.1702 |
| 140 | 100 | 200 | -150 | 105.2031 | 21.0464 | 66.5415 | 108.8730 |
| 150 | 90 | 190 | -150 | 105.9616 | 66.5415 | 21.0464 | 103.9075 |
| 150 | 110 | 210 | -150 | 105.9616 | 21.0464 | 66.5415 | 99.04466 |
| 160 | 110 | 210 | -120 | 136.0012 | 79.3318 | 79.3318 | 120.7044 |
| 140 | 100 | 200 | -120 | 135.2031 | 51.0464 | 96.5415 | 138.8730 |
| mm | |||||||
| l1 | l2 | l3 | l4 | x | y1 | y2 | z |
| 106 | 66 | 21 | 95 | 160.0099 | 100.0035 | 200.3694 | -150.0141 |
| 105 | 21 | 66 | 108 | 146.8173 | 107.2413 | 206.5883 | -148.6636 |
| 105 | 66 | 21 | 103 | 149.9972 | 90.1848 | 189.6942 | -150.9609 |
| 105 | 21 | 66 | 99 | 149.3046 | 109.5547 | 209.1319 | -150.9323 |
| 136 | 79 | 79 | 120 | 160.5072 | 110.3637 | 210.6410 | -119.9843 |
| 135 | 51 | 96 | 138 | 146.8173 | 107.2413 | 206.5883 | -178.6636 |
3 机构工作空间分析
影响2-2PRUR机构工作空间的因素主要包括杆长的限制、外部整体机架尺寸的限制、杆件的干涉、运动副转动范围的限制。由于2-2PRUR并联机构实现的运动是3个方向的平动和相对于z轴的转动,因此该机构没有灵活工作空间,下面就该并联机构的定姿态工作空间进行研究。
在综合考虑以上影响工作空间的几个因素之后,使用数学软件编程,首先按2.5节内容设定初始值,并确定主动平台中心P点和驱动li的运动范围,具体数值见表 3。
| 参数 | 初始值 |
| kij/mm | 150 |
| a/mm | 300 |
| l/mm | 100 |
| r/mm | 50 |
| li/mm | 0≤li≤100 |
| P(x,y,z)运动范围/mm | 50≤x≤250 |
| 50≤y≤250 | |
| -400≤z≤-100 |
根据初始设定绘制主动平台中心点P可达位置的散点图,并用散点图绘制相应的工作空间三维立体图,当动平台姿态角θ为0°时,绘制结果如图 6所示。

|
| 图 6 姿态角为0°时的工作空间 Fig. 6 Workspace with posture angle values 0° |
如图 6所示,由于2-2PRUR机构的整体构型为非对称结构,因此工作空间也成非对称图形。可以看出,2-2PRUR机构的工作空间没有因为结构的不对称性而产生畸变,整体相对平滑而且内部没有产生空洞。
当2个副动平台产生相对移动时,再次依据上面的步骤绘制机构的散点图和三维工作空间视图,动平台姿态角θ为45°和-45°时,即y1-y2=100 mm和-100 mm时,绘制结果分别如图 7(a)、图 7(b)所示。

|
| 图 7 姿态角为±45°时的工作空间 Fig. 7 Workspace with posture angle values ±45° |
上述分析可看出,在2个副动平台的偏角方向不同时,机构工作空间也会产生很大差别,这是由于机构整体的不对称性产生的。工作空间整体相对平滑无空洞。
4 基于遗传算法的工作空间优化在第3节的分析中,虽然在姿态角不同时机构工作空间都相对平滑无空洞,但从图 6和图 7中可看出工作空间体积较小,尤其当姿态角为0°时,3个方向上的运动范围均小于100 mm。为更大程度满足工业生产线机器人的抓取-放置任务要求,需对机构工作空间体积进行优化。
使用遗传算法对2-2PRUR机构工作空间体积进行优化计算。将2-2PRUR机构工作空间体积值等效为散点个数值,工作空间的具体体积值即为以每个散点为球心的小球体积和。由此,2-2PRUR机构工作空间体积优化过程就变成了优化2-2PRUR机构杆长使工作空间散点个数最大的过程,不但避免了繁杂的表达式推导过程,又达到了优化的目的。
优化问题由目标函数和约束条件两部分组成[19-20]。约束条件有:4个驱动移动副的行程、转动副与U副转角的范围、副动平台齿轮齿条的行程、杆件之间的干涉。写出目标函数如下:

|
其中:X为优化变量;m为优化目标;splashes为散点;workspace为机构工作空间。
结合约束条件,给出所优化杆长的尺寸约束范围(单位均为mm):
|
图 8展示了从0~50代的遗传运算过程,其中,每隔一个单位取一个点。可以看出从第15代开始进化趋于平稳,此时m值最大,即散点数目最大,工作空间体积最大。

|
| 图 8 各代适应度函数m值 Fig. 8 m values of each generation of fitness function |
根据尺寸优选的一组结构参数初值和通过遗传算法优化计算得出的优化结构参数数据如表 4所示。
| 参数 | 初始值 | 优化值 |
| k11/mm | 150 | 58.21356151 |
| k12/mm | 150 | 128.4783055 |
| k21/mm | 150 | 57.12848677 |
| k22/mm | 150 | 116.0951255 |
| a/mm | 300 | 226.6077689 |
| l/mm | 100 | 148.1780424 |
| r/mm | 50 | 149.8667562 |
| m | 37852×3 | 161928×3 |
优化前的工作空间三维图如图 6、图 7所示。优化后的工作空间三维图如图 9所示。

|
| 图 9 优化后的工作空间视图 Fig. 9 Optimized workspace view |
优化前后的工作空间截面边界图如图 10所示。从三维图与截面边界图的坐标上下限和图像形状可以看出优化后的工作空间覆盖面积更大,相反,优化前的工作空间只覆盖到了工作区域右侧的一部分。优化后的工作空间散点总数为优化前的427.79%,工作空间体积显著增大。

|
| 图 10 优化前后的工作空间截面边界图 Fig. 10 Cross section boundary of workspace before and after optimization |
优化后的工作空间整体不仅仅局限在工作区域的一小部分,可以更好地满足工业生产需要。由表 4优化数据可看出,机构整体尺寸在优化后较优化前体积更小,而机构工作空间体积反而比优化前更大,故达到了优化的目的。
5 结论1) 提出了新型四自由度并联机构与消除过约束、增大转动自由度角度的方法,确定四自由度的运动性质为三平动一绕z轴的转动。
2) 建立了新型四自由度并联机构约束方程,计算位置正反解,并以位置反解为基础绘制机构工作空间。
3) 提出以散点数目代替体积表达式优化工作空间体积的新方法,基于遗传算法优化机构工作空间,给出优化机构尺寸。对此类机构进一步研究和发展应用有重要意义。
| [1] |
房海蓉, 方跃法, 郭胜. 四自由度对称并联机器人结构综合方法[J].
北京航空航天大学学报, 2005, 31 (3): 346–350.
FANG H R, FANG Y F, GUO S. Structural synthesis method for 4-degrees-of-freedom symmetrical parallel manipulators[J]. Journal of Beijing University of Aeronautics and Astronautics, 2005, 31 (3): 346–350. (in Chinese) |
| [2] |
郭江真, 王丹, 樊锐, 等. 3PRS/UPS冗余驱动并联机器人刚度特性分布[J].
北京航空航天大学学报, 2014, 40 (4): 500–506.
GUO J Z, WANG D, FAN R, et al. Stiffness characteristics distribution of 3PRS/UPS parallel manipulator with actuation redundancy[J]. Journal of Beijing University of Aeronautics and Astronautics, 2014, 40 (4): 500–506. (in Chinese) |
| [3] | CLAVEL R.Delta, a fast robot with parallel geometry[C]//Proceedings of the 18th International Symposium on Industrial Robots.Bedford:IFS Publications, 1988:91-100. |
| [4] | ANGELES J. The qualitative synthesis of parallel manipulators[J]. Journal of Mechanical Design, 2004, 126 (4): 617–624. DOI:10.1115/1.1667955 |
| [5] | KONG X, GOSSELIN C. Type synthesis of 3T1R 4-DOF parallel manipulators based on screw theory[J]. Journal of Robotic Systems, 2005, 22 (10): 535–547. DOI:10.1002/(ISSN)1097-4563 |
| [6] | GOGU G. Structural synthesis of fully-isotropic parallel robots with Sch nflies motions via theory of linear transformations and evolutionary morphology[J]. European Journal of Mechanics-A/Solids, 2007, 26 (2): 242–269. DOI:10.1016/j.euromechsol.2006.06.001 |
| [7] | SALGADO O, ALTUZARRA O, PETUYA V, et al. Type synthesis of a novel 3T1R fully-parallel manipulator[J]. Journal of Mechanical Design, 2008, 130 (4): 042305-1–042305-8. DOI:10.1115/1.2839005 |
| [8] | PIERROT F, NABAT V, COMPANY O, et al. Optimal design of a 4-DOF parallel manipulator:From academia to industry[J]. IEEE Transactions on Robotics, 2009, 25 (2): 213–224. DOI:10.1109/TRO.2008.2011412 |
| [9] | PIERROT F, COMPANY O.H4:A new family of 4-DOF parallel robots[C]//Proceedings of IEEE/ASME International Conference on Advanced Intelligent Mechatronics.Piscataway, NJ:IEEE Press, 1999:508-513. |
| [10] | COMPANY O, KRUT S, PIERROT F. Internal singularity analysis of a class of lower mobility parallel manipulators with articulated traveling plate[J]. IEEE Transactions on Robotics, 2006, 22 (1): 1–11. DOI:10.1109/TRO.2005.858862 |
| [11] | ROLLAND L.The Manta and the Kanuk:Novel 4-DOF parallel mechanisms for industrial handling[C]//Proceedings of International Mechanical Engineering Congress and Exposition.New York, NY:ASME, 1999:831-844. |
| [12] | KRUT S, COMPANY O, BENOIT M, et al.I4:A new parallel mechanism for Scara motions[C]//Proceedings of the IEEE International Conference on Robotics & Automation.Piscataway, NJ:IEEE Press, 2003:1875-1880. |
| [13] | KRUT S, NABAT V, COMPANY O, et al.A high-speed parallel robot for Scara motions[C]//Proceedings of IEEE International Conference on Robotics and Automation.Piscataway, NJ:IEEE Press, 2004:4109-4115. |
| [14] | CORADINI C, FAUROUX J C, KRUT S, et al.Evalution of a 4 degree of freedom parallel manipulator stiffness[C]//Proceedings of the 11th World Congress in Mechanism and Machine Science.Beijing:China Machinery Press, 2004:1857-1861. |
| [15] | GUO S, FANG Y, QU H. Type synthesis of 4-DOF non-overconstrained parallel mechanisms based on screw theory[J]. Robotica, 2012, 30 (1): 31–37. DOI:10.1017/S0263574711000439 |
| [16] |
黄真, 刘婧芳, 李艳文.
论机构自由度[M]. 北京: 科学出版社, 2011: 90-103.
HUANG Z, LIU J F, LI Y W. Mobility of mechanisms[M]. Beijing: Science Press, 2011: 90-103. (in Chinese) |
| [17] |
黄真, 孔令富, 方跃法.
并联机器人机构学理论及控制[M]. 北京: 机械工业出版社, 1997: 18-29.
HUANG Z, KONG L F, FANG Y F. Mechanism theory and control of parallel manipulator[M]. Beijing: China Machine Press, 1997: 18-29. (in Chinese) |
| [18] |
郭宗和, 段建国, 郝秀清, 等. 4-PTT并联机构位置正反解与工作空间分析[J].
农业机械学报, 2008, 39 (7): 144–148.
GUO Z H, DUAN J G, HAO X Q, et al. Analysis on position and workspace of 4-PTT parallel mechanism[J]. Transactions of the Chinese Society of Agricultural Machinery, 2008, 39 (7): 144–148. (in Chinese) |
| [19] |
鄔昌峰. 6-SPS并联机器人工作空间研究及其优化设计[D]. 合肥: 合肥工业大学, 2003.
WU C F.6-SPS parallel mechanism workspace research and optimization[D].Hefei:Hefei University of Technology, 2003(in Chinese). |
| [20] |
陈海真, 邹忠月, 宋宏鹏. 基于遗传算法3-RCR并联机器人的结构参数优化设计[J].
机械设计与制造, 2012 (7): 49–51.
CHEN H Z, ZOU Z Y, SONG H P. Parameters optimization design of 3-RCR parallel robot mechanism based on genetic algorithm[J]. Machinery Design & Manufacture, 2012 (7): 49–51. (in Chinese) |