



2. 武警工程大学 装备工程学院, 西安 710086;
3. 空军航空大学 飞行教官训练基地, 蚌埠 233000
2. College of Equipment Engineering, Engineering University of CAPF, Xi'an 710086, China ;
3. Flying Instructor Training Base, Air Force Aviation University, Bengbu 233000, China
近年来,越来越多的国家开始研究一类既能够在空中飞行,又能够在水面和水下航行的跨介质航行器,例如文献[1-2]中提出了一种可潜水飞机详细的设计指标。航行器在水空介质交替反复的运动中,伴随着力和力矩突变、气液扰动及复杂的碰撞现象,会对航行器控制造成不利影响,从而严重制约其航行的稳定性。目前,还没有适用于航行器水空跨越的一体化控制策略,而采用空中和水下分段控制的策略,会造成控制系统的复杂程度增加,可靠性降低,同时,还存在空中和水下控制器切换不稳定的问题。因此,本文提出一种空中控制水下非控的单一控制策略:通过空中控制航行器姿态、速度等,使其能够在非控状态下完成入水、水下航行、进而出水的一系列动作,并在其出水后能够满足空中控制起飞的初始状态要求。本文针对介质跨越航行器非控状态下的入水过程展开研究。
入水过程作为介质跨越武器空中弹道的延续和水中弹道的起始,有着完整性和典型性的特征[3],整个过程涉及空气、水和弹性物体三者之间的相互作用,既是一个具有自由面和特殊空泡的流体力学问题,又是有可能引起结构破坏的高速撞击问题,还有弹性物体运动的动力学问题,研究解决这些问题,实验是必不可少的。Waugh和Stubstad[4]系统地介绍了关于入水弹道实验模拟的知识和技术,并观测记录了许多入水实验方法、过程和结果;May[5]汇集了以往有价值的入水知识和实验数据与资讯,系统分析了影响入水弹道的各种因素;文献[6-8]分别针对圆柱体和球体的入水问题开展了实验研究,分析了入水空泡的形成、发展、闭合及溃灭过程。文献[9-11]分别对不同头型物体入水进行研究,得出头部形状对空泡与入水稳定性有着重要影响。
随着计算机数值计算的发展,关于航行器入水运动的数值仿真计算方法研究越来越多,文献[12-13]应用流体体积函数(VOF)结合动网格技术的方法,对物体垂直入水进行了数值计算研究,并验证了数值计算方法的有效性。文献[14]对某型号圆盘尖拱头型水下航行器4种姿态角的高速斜入水冲击进行了探索性的数值仿真研究。文献[15]建立了空投雷弹斜入水的数值模型并对入水初始弹道进行数值模拟。Park和Jung[16]利用面元法数值计算了正切尖拱体以任意角度入水的冲击载荷,并对尖拱体的忽扑行为进行了数值计算分析。
可以看出关于航行器入水过程的研究,主要是采用实验和数值计算方法,而且多是针对某一特定工况条件或某一细节方面展开研究,缺乏对整个入水过程运动规律以及弹道特性的理论研究。本文采用理论分析方法,以低速入水的介质跨越航行器为研究对象,忽略自由面变化、喷溅、入水空泡等复杂物理现象细节,通过受力分析,构建入水动力学模型,并对航行器入水运动规律和弹道进行了研究。
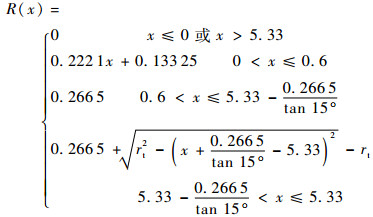
1 动力学模型构建 1.1 物理模型本文采用全长l=5.33 m,质量分布均匀,头部为30°顶角的尖拱体形状,尾部为线性截断尾部的回转圆柱体为研究对象,其物理模型如图 1所示,半径R计算公式为

|
| 图 1 航行器物理模型示意图 Fig. 1 Schematic diagram of vehicle physical model |
|
(1) |
式中:
如图 2所示,选取弹体坐标系作为参考坐标系,质心位置为坐标原点,航行器入水角为θ。由于受到的空气作用力较小,可忽略不计,整个入水过程中仅受到重力G、浮力B和流体作用力F的相互作用,其中重力G保持不变,浮力B和流体作用力F都随航行器入水距离xa的变化而变化。

|
| 图 2 航行器入水作用力分析 Fig. 2 Force analysis of vehicle water-entry |
重力G在整个入水过程中保持不变,为一定值:

|
(2) |
式中:ρ=1.2×103 kg/m3为航行器的密度;V为航行器的体积;m为航行器的质量; g为重力加速度;L为航行器的长度。
质心(全浸没时的浮心)位置为
|
(3) |
浮力B的大小和浮心位置均随入水距离xa变化而变化,假设浮力不受自由水面隆起的影响,则浮力和浮心位置分别为

|
(4) |
|
(5) |
式中:ρ0=1.0×103 kg/m3为海水密度。
1.2.3 流体作用力F由于入水过程中流体作用力非常复杂,为便于分析,本文将其分为理想流体作用力和黏性流体作用力两部分分别计算。
1)理想流体作用力Fi
由动量和动量矩定理可得,理想流体对航行器的作用力主矢和主矩分别为
|
(6) |

|
(7) |
式中:Fi为理想流体对航行器的作用力;Mi为理想流体对航行器的力矩;Qf和Kf分别为理想流体对航行器的动量和动量矩,可由附加质量的方法得出[17];ω和v分别为航行器转动角速度和速度矢量。
入水过程中,航行器的浸水体积不断变化,附加质量是随着时间变化的[18],因此必须充分考虑附加质量变化的影响。本文在分析理想流体作用力时,不仅考虑附加质量的变化,而且还引入了附加质量变化率。依据式(6)和式(7),并根据附加质量的定义[17]以及航行器的对称性,可得理想流体作用力公式:

|
(8) |
式中:Fix和Fiy分别为理想流体对航行器在x轴和y轴方向的作用力;Miz为理想流体对航行器在z轴方向的力矩;vx和vy分别为航行器在x轴和y轴的速度分量;ωz为航行器绕z轴转动的角速度;λ为附加质量项。随着航行器的入水运动,其浸没水中的体积逐渐增大,附加质量也随着增大,可采用剖面法进行附加质量及其变化率的计算[19]:

|
(9) |
由于细长体的附加质量λ11很小[18],此处设λ11=0,同时有

|
(10) |
式中:dxa为航行器水中部分长度的变化率,其大小为dxa=vxdt。
2)黏性流体作用力Fμ
实验和实际理论分析都指出:水下物体运动的升阻力系数与速度、雷诺数和攻角有关[20]。本文研究的航行器入水速度较低,速度变化范围小,可忽略雷诺数变化的影响。由于入水过程的复杂性,使得求解黏性流体作用力非常困难,本文通过采用CFD数值仿真方法,计算求得航行器在水下不同速度v、攻角α下的阻力Fμx、升力Fμy和绕质心的力矩Mμz,利用式(11)可得到黏性流体动力系数:升力系数Cl、阻力系数Cd、俯仰力矩系数mz(见图 3)。

|
| 图 3 CFD仿真得到的黏性流体动力系数与攻角、速度的关系 Fig. 3 Relationship between dynamic coefficients of simulation by CFD and attack angle and speed |

|
(11) |
通过CFD计算得知,黏性流体动力系数随着攻角、速度的变化关系是一一对应的。故可制作3张行为速度、列为攻角的黏性流体动力系数二维插值表,则黏性流体动力系数可由计算得到的当前速度和攻角插值得到,进而求解入水过程中的黏性流体动力。
黏性流体动力系数可由式(12)插值求得

|
(12) |
则可求得入水过程中黏性流体作用力为

|
(13) |
式中:S0为航行器表面积;S为航行器入水过程中的浸水面积。当航行器完全进入水中之后,黏性流体作用产生的俯仰力矩为
|
(14) |
根据1.2节受力分析,构建航行器入水运动动力学模型计算公式:
|
(15) |
式中:xb为浮心与重心之间的距离;J为航行器的转动惯量,可根据圆盘形转动惯量计算公式及平行移轴定理求得

|
(16) |
式(1)~式(16)构成了可描述航行器入水运动的微分方程组,给定初值条件可进行求解。初值条件包括初始速度(vx0, vy0)、入水角度θ0、转动角速度ωz0和初始航行器头部顶点在轴线方向距水面的距离xa0。
2 模型验证为验证第1节所构建的动力学方程的正确性,本文采用Fluent动网格技术,对同一工况条件下的入水运动进行仿真,并比较2种计算方法的仿真结果。仿真初始条件同取为:入水速度20 m/s,入水角度45°,转动角速度为0 rad/s,攻角为0°,初始航行器头部顶点在轴线方向距水面的距离取为2倍航行器直径[21]。数值仿真方法求得的航行器入水过程如图 4所示,每个图中上部为空气,下部为海水,从t=0.04s开始,相邻两图的时间间隔为0.04 s,结束时间t=0.4 s。

|
| 图 4 航行器入水过程CFD仿真结果 Fig. 4 Results of vehicle water-entry process simulated by CFD |
在同等初始条件下,本文构建的理论模型计算得到的航行器入水过程如图 5所示。其中水平虚点线为水平面,蓝色粗实线为理论模型计算得到质心运动轨迹,红色细实线为航行器轮廓,红色虚划线为数值仿真计算得到质心运动轨迹。为便于比较,将红色虚划线的质心运动轨迹整体左移2 m。从图 4、图 5中可看出,2种方法计算得到的质心运动轨迹基本吻合;入水初期弹道较为平直,随着头部接触水面开始,弹道开始向上弯曲。图 6为入水倾斜角度变化曲线, 入水初期倾斜角几乎保持不变,而后迅速减小,到后期又趋于平直;2种方法所得结果基本吻合。图 7、图 8分别为2种方法计算得到的轴向、径向位移变化曲线,吻合较好。在入水初期,2种方法计算得到的轴向、径向位移近似成线性增大;而后增大逐渐变缓,数值计算的结果略大于理论方法的结果。图 9为入水速度变化曲线, 航行器初始运动时,头部距水面有一定高度,此时只受到重力作用,故入水速度略微增大;待头部接触水面开始,受到重力、浮力和流体作用力的综合作用,入水速度迅速减小;2种方法所得结果基本吻合。图 10为2种方法计算得到的转动角速度变化曲线,结果基本吻合。

|
| 图 5 质心运动轨迹变化对比 Fig. 5 Comparison of centroid trajectory |

|
| 图 6 倾斜角度对比 Fig. 6 Comparison of inclination angle |

|
| 图 7 轴向位移对比 Fig. 7 Comparison of axial displacement |

|
| 图 8 径向位移对比 Fig. 8 Comparison of radial displacement |

|
| 图 9 速度对比 Fig. 9 Comparison of velocity |

|
| 图 10 转动角速度对比 Fig. 10 Comparison of rotational angular velocity |
通过图 4~图 10对比可知,在同等工况条件下,2种方法仿真计算所得的航行器入水过程质心轨迹、倾斜角度、轴向位移、径向位移、速度和转动角速度的变化规律基本吻合,可验证本文所构建的理论模型的正确性,并能够准确描述航行器入水运动的轨迹姿态。但也存在一定的误差:相对于数值仿真方法计算结果,理论计算方法得到的质心轨迹、倾斜角度、轴向位移和径向位移的变化趋势较为缓慢,而速度和转动角速度的变化较快。
产生误差的原因主要有2个方面:①理论模型求解忽略了入水过程中水面的扰动作用,黏性流体动力系数采用插值法求解,存在一定误差。②数值仿真计算方法会由于网格的划分、湍流模型和参数选择等原因产生计算误差。
3 模型仿真为了分析不同入水速度、入水角度和攻角下航行器入水运动的规律,对模型进行多次不同条件的仿真,并进行对比。
3.1 仿真1仿真初始入水速度对航行器入水的影响。设置入水初始条件:初始位置xa0=-1 m;初始入水角度为45°;初始转动角速度为0 rad/s;初始攻角为0°;本文研究的是航行器低速入水过程,最大初始入水速度取为30 m/s,设初始入水速度以5 m/s的间隔由10 m/s逐渐增加到30 m/s。仿真结果如图 11~图 16所示。

|
| 图 11 初始入水速度对质心运动轨迹的变化 Fig. 11 Change of centroid trajectory under different initial water-entry velocities |

|
| 图 12 初始入水速度对倾斜角度的变化 Fig. 12 Change of inclination angle under different initial water-entry velocities |

|
| 图 13 初始入水速度对攻角的变化 Fig. 13 Change of attack angle under different initial water-entry velocities |

|
| 图 14 初始入水速度对转动角速度的变化 Fig. 14 Change of rotational angular velocity under different initial water-entry velocities |

|
| 图 15 初始入水速度对轴向速度的变化 Fig. 15 Change of axial velocity under different initial water-entry velocities |

|
| 图 16 初始入水速度对径向速度的变化 Fig. 16 Change of radial velocity under different initial water-entry velocities |
通过对比图 11~图 16可知:相同入水角度下,入水速度越大,轴向速度变化越大,而径向速度变化越小,航行器姿态变化越小,即倾斜角、转动角速度变化越小,对应的攻角变化越小,弹道越容易保持稳定,越不易发生弯曲,入水深度和水平位移越大。
航行器入水开始时,头部距水面有一定高度,在重力作用下,轴向速度、径向速度有小幅度增大,并形成一个小的正攻角;相同入水角度下,头部距水面的轴向距离相等,入水速度越大,头部接触水面的时刻越早,重力作用时间越短,轴向速度、径向速度以及攻角的增加量越小,弹道、倾斜角度和转动角速度保持不变。航行器接触水面时,头部下表面形成法向力和抬头力矩,以及正攻角,攻角进一步增大,转动角速度开始增大,弹道开始向上弯曲,倾斜角变小,轴向速度、径向速度继续增大;入水速度越大,抬头力矩作用于航行器的时间越短,依据刚体的动量矩定理,获得的转动角速度越小,倾斜角、攻角、轴向速度和径向速度变化越小,弹道向上弯曲程度越小。头部完全进入水中后,不再提供抬头力矩,航行器以前期获得的转动角速度继续转动,转动角速度迅速减小,回转半径增大,弹道轨迹趋于平直,倾斜角继续减小,攻角、轴向速度和径向速度迅速减小。
3.2 仿真2仿真初始入水角度对航行器入水的影响。入水初始条件:初始位置xa0=-1 m;初始入水速度20 m/s;初始转动角速度为0 rad/s;初始攻角为0°;初始入水角度分别为10°、20°、30°、45°、60°、70°、80°。仿真结果如图 17~图 22所示。

|
| 图 17 初始入水角度对质心运动轨迹的变化 Fig. 17 Change of centroid trajectory under different initial water-entry angles |

|
| 图 18 初始入水角度对倾斜角度的变化 Fig. 18 Change of inclination angle under different initial water-entry angles |

|
| 图 19 初始入水角度对攻角的变化 Fig. 19 Change of attack angle under different initial water-entry angles |

|
| 图 20 初始入水角度对转动角速度的变化 Fig. 20 Change of rotational angular velocity under different initial water-entry angles |

|
| 图 21 初始入水角度对轴向速度的变化 Fig. 21 Change of axial velocity under different initial water-entry angles |

|
| 图 22 初始入水角度对径向速度的变化 Fig. 22 Change of radial velocity under different initial water-entry angles |
通过仿真发现,初始入水角度为10°、20°时,航行器头部未完全入水,尾部即已接触水面,造成了航行器入水极不稳定,在此不进行讨论。通过对比图 17~图 22可知:相同入水速度下,入水角度越大,倾斜角变化越小,同时转动角速度越小,姿态变化越小,对应的攻角和径向速度变化越小,而轴向速度变化基本一致,弹道越容易保持稳定,越不易发生弯曲,入水深度越大,水平位移越小。
航行器入水开始时,不同初始入水角度下,头部距水面有一定高度,且轴向距离相等,在重力作用下,入水角度越大,重力在轴向的分力越大,径向分力越小,轴向速度增加越大,径向速度以及攻角的增加量越小,弹道、倾斜角度和转动角速度保持不变。航行器接触水面时,头部下表面形成法向力和抬头力矩,以及正攻角,攻角进一步增大,转动角速度开始增大,弹道开始向上弯曲,倾斜角变小,轴向速度开始减小,径向速度继续增大;入水角度越大,头部完全入水时间越短,即抬头力矩作用时间越短,依据刚体的动量矩定理,获得的转动角速度越小,倾斜角、攻角、轴向速度和径向速度变化越小,弹道越趋于平直。头部完全进入水中后,不再提供抬头力矩,航行器以前期获得的转动角速度继续转动,转动角速度、攻角和径向速度减小至零,轴向速度迅速减小,倾斜角趋于定值,弹道轨迹趋于平直。
3.3 仿真3仿真初始攻角对航行器入水的影响。设置入水初始条件:初始位置xa0=-1 m;初始入水速度20 m/s;初始入水角度45°;初始转动角速度0 rad/s;本文研究的航行器入水过程与空头鱼雷入水过程类似,为减小入水冲击对内部结构的影响,入水攻角不可太大,故初始攻角α0分别取为0°、±5°、±10°。仿真结果如图 23~图 28所示。

|
| 图 23 初始攻角对质心运动轨迹的变化 Fig. 23 Change of centroid trajectory under different initial attack angles |

|
| 图 24 初始攻角对倾斜角度的变化 Fig. 24 Change of inclination angle under different initial attack angles |

|
| 图 25 初始攻角对攻角的变化 Fig. 25 Change of attack angle under different initial attack angles |

|
| 图 26 初始攻角对转动角速度的变化 Fig. 26 Change of rotational angular velocity under different initial attack angles |

|
| 图 27 初始攻角对轴向速度的变化 Fig. 27 Change of axial velocity under different initial attack angles |

|
| 图 28 初始攻角对径向速度的变化 Fig. 28 Change of radial velocity under different initial attack angles |
通过对比图 23~图 28可知:当α0≥0°时,初始攻角越大,倾斜角变小趋势越大,同时正向转动角速度越大,对应的攻角变化越大;轴向速度和径向速度变小趋势越大,弹道越容易向上弯曲,入水深度和水平位移越小。
当α0 < 0°时,初始攻角越大,倾斜角变大趋势越大,负向转动角速度越大,对应的攻角变化越大;径向速度变小趋势越大,而轴向速度变小趋势基本一致,弹道越容易向下弯曲,入水深度越大,水平位移越小。
航行器入水开始时,入水速度相等,攻角越大,径向速度越大,轴向速度越小。头部距水面有一定高度,在重力作用下,轴向速度在正方向有小幅度增大,径向速度在负方向有小幅度增大,并形成一个小的正攻角。因此,当α0≥0°时,攻角、轴向速度、径向速度均有所增大,弹道向上弯曲,攻角越大,弯曲程度越大;当α0 < 0°时,轴向速度有小幅度增大,而攻角、径向速度均有所减小,弹道向下弯曲,攻角值越大,弯曲程度越大。航行器接触水面时,头部下表面形成法向力和抬头力矩;当α0≥0°时,由于攻角为正,形成向上的流体作用力矩,在2个力矩的综合作用下,攻角先减小后增大,转动角速度开始增大,弹道继续向上弯曲,倾斜角迅速变小,轴向速度、径向速度开始减小;当α0 < 0°时,由于攻角为负,形成向下的流体作用力矩,在2个力矩的综合作用下,攻角持续减小,转动角速度开始负向增大,弹道继续向下弯曲,倾斜角变大,轴向速度、径向速度减小;攻角值越大,形成的流体作用力矩越大,弹道、倾斜角、攻角、转动角速度、轴向速度、径向速度变化趋势越大。头部完全进入水中后,不再提供抬头力矩,随着前期攻角的减小,流体作用力矩也在减小直至为零,航行器转动角速度开始减小,攻角、轴向速度和径向速度迅速减小,倾斜角趋于定值,弹道轨迹逐渐趋于平直。
4 结论针对介质跨越航行器控制困难的问题,提出一种空中控制水下非控的单一控制策略;针对其非控状态下的入水过程进行分析,以航行器为研究对象,引入时变的浮力、附加质量等参量,构建了适用于航行器低速入水的动力学模型,可以实现航行器入水运动姿态的仿真,仿真结果和数值计算方法仿真结果相吻合。使用此动力学模型进行航行器入水运动规律研究,得到以下结论:
1)航行器入水过程中,受初始状态影响较大。
2)入水速度越大,航行器姿态变化越小,弹道越容易保持稳定,入水深度和水平位移越大。
3)入水角度越大,弹道越容易保持稳定,越不易发生弯曲,入水深度越大,水平位移越小。
4)攻角的大小和方向对航行器入水过程影响较大,攻角的值越大,姿态变化越大,弹道越容易弯曲。
| [1] | EASTGATE J, GODDARD R.Submersible aircraft concept design study[C]//11th International Conference on Fast Sea Transportation, FAST 2011.Alexandria:American Society of Naval Engineers, 2011:813-820. |
| [2] | KATHRYN W.Submersible aircraft concept design study-Amendment1:NSWCCD-CISD-2011/015[R].Carderock, MD:Naval Surface Warfare Center Carderock Division, 2011. |
| [3] | 严忠汉. 试论鱼雷入水问题[J]. 中国造船, 2002, 43 (3) : 88 –93. YAN Z H. A brief neview of water-entry problems for torpedo[J]. Ship Building of China, 2002, 43 (3) : 88 –93. (in Chinese) |
| [4] | WAUGH J G, STUBSTAD G W.Hydroballistics modeling:AD A 007529[R].Washington, D.C.:NASA, 1975. |
| [5] | MAY A.Water-entry & cavity running behavior of missiles:AD A 020429[R].Washington, D.C.:NASA, 1975. |
| [6] | 何春涛, 王聪, 何乾坤, 等. 圆柱体低俗入水空泡试验研究[J]. 物理学报, 2012, 61 (13) : 134701 . HE C T, WANG C, HE Q K, et al. Low speed water-entry of cylindrical projictile[J]. Acta Physica Sinica, 2012, 61 (13) : 134701 . (in Chinese) |
| [7] | 何春涛, 王聪, 魏英杰, 等. 圆柱体垂直入水空泡形态试验[J]. 北京航空航天大学学报, 2012, 38 (11) : 1542 –1546. HE C T, WANG C, WEI Y J, et al. Vertical water entry cavity of cylinder body[J]. Journal of Beijing University of Aeronautics and Astronautics, 2012, 38 (11) : 1542 –1546. (in Chinese) |
| [8] | 马庆鹏, 何春涛, 王聪, 等. 球体垂直入水空泡实验研究[J]. 爆炸与冲击, 2014, 34 (2) : 174 –180. MA Q P, HE C T, WANG C, et al. Experiment investigation on vertical water-entry cavity of sphere[J]. Explosion and Shock Waves, 2014, 34 (2) : 174 –180. (in Chinese) |
| [9] | 胡青青.不同倾角下钝体入水后的超空泡流动的实验观察及数值计算[D].杭州:浙江理工大学, 2014:32-35. HU Q Q.Experimental observation and numerical calculation of supercavity flow of blunt body under different inlination angle into the water[D].Hangzhou:Zhejiang Sci-Tech University, 2014:32-35(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10338-1014226386.htm |
| [10] | 张伟, 郭子涛, 肖新科, 等. 弹体高速入水特性实验研究[J]. 爆炸与冲击, 2011, 31 (6) : 579 –584. ZHANG W, GUO Z T, XIAO X K, et al. Experimental investigations on behaviors of projectile high-speed water entry[J]. Explosion and Shock Waves, 2011, 31 (6) : 579 –584. (in Chinese) |
| [11] | 顾建农, 张志宏, 王冲, 等. 旋转弹头水平入水空泡及弹道实验研究[J]. 兵工学报, 2012, 33 (5) : 540 –544. GU J N, ZHANG Z H, WANG C, et al. Experimental research for cavity and ballistics of a rotating bullet entraining water levelly[J]. Acta Armamentarii, 2012, 33 (5) : 540 –544. (in Chinese) |
| [12] | 陈宇翔, 郜冶, 刘乾坤. 应用VOF方法的水平圆柱入水数值模拟[J]. 哈尔滨工程大学学报, 2011, 32 (11) : 1439 –1442. CHEN Y X, GAO Y, LIU Q K. Numerical simulation of water-entry in a horizontal circular cylinder using the volume of fluid (VOF) method[J]. Journal of Harbin Engineering University, 2011, 32 (11) : 1439 –1442. (in Chinese) |
| [13] | 何春涛, 王聪, 闵景新, 等. 回转体匀速垂直入水早期空泡数值模拟研究[J]. 工程力学, 2012, 29 (4) : 237 –243. HE C T, WANG C, MIN J X, et al. Numerical simulation of early air-cavity of cylinder cone with vertical water-entry[J]. Engineering Mechanics, 2012, 29 (4) : 237 –243. (in Chinese) |
| [14] | 魏照宇, 石秀华, 王银涛, 等. 水下航行器高速斜入水冲击的探索仿真研究[J]. 西北工业大学学报, 2010, 28 (5) : 718 –723. WEI Z Y, SHI X H, WANG Y T, et al. Exploring high-speed oblique water entry impact of an underwater vehicle[J]. Journal of Northwestern Polytechnical University, 2010, 28 (5) : 718 –723. (in Chinese) |
| [15] | 王永虎, 石秀华. 空投鱼雷斜入水初始弹道数值分析[J]. 弹道学报, 2012, 24 (2) : 92 –95. WANG Y H, SHI X H. Numerical analysis for initial hydroballistics of airborne missile during oblique water-entry impact[J]. Journal of Ballistics, 2012, 24 (2) : 92 –95. (in Chinese) |
| [16] | PARK M S, JUNG Y R. Numerical study of impact force and ricochet behavior of high speed water-entry bodies[J]. Computers & Fluids, 2003, 32 (7) : 939 –951. |
| [17] | 严卫生. 鱼雷航行力学[M]. 西安: 西北工业大学出版社, 2005 : 26 . YAN W S. Torpedo mechanics[M]. Xi'an: Northwestern Polytechnical University Press, 2005 : 26 . (in Chinese) |
| [18] | 廖剑晖, 由小川, 吕海波, 等. 发展时变附加质量方法模拟飞行器出水过程[J]. 工程力学, 2012, 29 (4) : 202 –209. LIAO J H, YOU X C, LV H B, et al. Development of a time-varying added mass method in the simulations of the water-exit process of underwater vehicles[J]. Engineering Mechanics, 2012, 29 (4) : 202 –209. (in Chinese) |
| [19] | 罗格维诺维奇·T·B.自由边界流动的水动力学[M].施红辉, 译.上海:上海交通大学出版社, 2012:129-131.ЛОГВИНООВЧ Г В. Hydrodynamics of free-boundary flows[M].SHI H H, translated.Shanghai:Shanghai Jiao Tong University Press, 2012:129-131(in Chinese). |
| [20] | WILSON M B, KELLEY T R. Low froude number hydrodynamic performance of a flat plate hydrofoil[J]. Drag Forces, 1976 : 77 . |
| [21] | 刘曜. 波浪对运载器出水姿态角的影响[J]. 舰船科学技术, 2005, 27 (3) : 32 –34. LIU Y. Wave effect on a submerged missile capsule traveling near-surface[J]. Ship Science and Technology, 2005, 27 (3) : 32 –34. (in Chinese) |