



2. 上海航天控制技术研究所, 上海 20023;
3. 上海市空间智能控制技术实验室, 上海 200233
2. Shanghai Aerospace Control Technology Institute, Shanghai 20023 ;
3. Shanghai Key Laboratory of Aerospace Intelligent Control Technology, Shanghai 200233, China
随着空间科技的不断发展,航天任务复杂度逐渐增高,越来越多的航天器需要在空间中完成一系列的复杂操作从而完成既定的航天任务。为了确保航天任务的顺利进行与开展,几乎所有的航天器在发射之前均需进行大量的地面实验从而确保空间任务的顺利开展,这些实验包括材料强度实验、机构验证实验、电子电路实验等[1-4]。与数值仿真实验相比,直接利用地面实验设备建立地面动力学实物实验,对于验证航天器控制系统方案设计的正确性以及检验实际控制系统的功能等方面具有不可替代的验证作用[5]。
本文首先利用相似性理论给出真实空间环境中大尺度、长时间的航天器相对运动过程与地面实验环境中小尺度、短时间相对运动动力学实验之间的相似性对应关系,而后利用地面实验设备补偿地面实验环境与空间真实环境之间的动力学差异,然后对于地面实验环境中的干扰力进行详细的分析与建模,并利用相似对应关系给出航天器相对运动地面实验的控制策略,最后建立相似性度量函数从而证明航天器相对运动地面动力学实验结果的可信性。
1 相似性理论相似性理论是一种通过研究个别现象,从而推知所有与之相似现象特点的科学研究方法。随着科技水平的不断提高,相似性理论的研究取得了很多成果,但是其主要集中于材料、结构、机构以及航天员训练[6-7]等方面,在航天器的动力学问题上应用至今为止非常少。何兆伟等[8]提出利用相似性理论建立航天器地面实验,但是并没有解决地面实验结果的可信度问题。利用地面实验的方法模拟航天器在空间环境中的运动不仅能够更加直观地观察航天器的运行状况,也能够提前对于航天器的运动规律有所了解。
相似性理论的基础是相似三定理[9],通过相似三定理可以建立实验系统的相似准则,从而得到系统原型与实验模型之间的对应关系。对于一般的航天器相对运动动力学过程,描述动力学系统的变量如表 1所示。
| 物理量 | 量纲 |
| 角度φ | [-] |
| 航天器质量m | [M] |
| 航天器位置r | [L] |
| 周期P | [T] |
| 转动惯量J | [ML2] |
| 引力系数μE | [L3T-2] |
| 力F | [MLT-2] |
| 速度v | [LT-1] |
| 加速度a | [LT-2] |
| 力矩M | [ML2T-2] |
| 角速度ω | [T-1] |
| 角加速度α | [T-2] |
| 冲量I | [MLT-1] |
| 角动量H | [ML2T-1] |
通过表 1可以发现航天器相对运动地面动力学实验中基本量纲为:质量[M]、长度[L]、时间[T]。相应的,动力学实验过程中任意物理量A的量纲均可以由式(1)表示。

|
(1) |
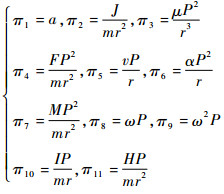
式中:β、γ、η称为量纲指数。由π定理可知,所有完整的关系式都可以通过无量纲化从而得到相似准则[10]。对于航天器动力学实验而言,共有14个物理量,其中无量纲物理量1个,基本量纲数量为3,故可以导出11个无量纲数如式(2)所示。
|
(2) |
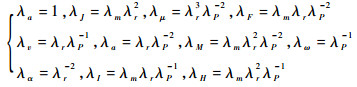
式中:πi为无量纲数。由相似三定理可知,通过无量纲数可以导出航天器相对运动过程中各变量在空间运动原型与地面实验模型间的比例因子要求,该比例因子要求如式(3)所示。
|
(3) |
式中:λA为对应于物理量A的比例因子。其物理意义为航天器相对运动过程中该物理量与地面动力学实验过程中该物理量的比值。满足式(3)的地面实验模型可以认为与空间中航天器的相对运动完全相似。通过式(3)可以得知,在航天器相对运动地面动力学实验中只需确定质量比例因子λm、周期比例因子λP以及位置比例因子λr即可求得地面实验过程中所有比例因子的值,从而确定地面实验模型与空间相对运动之间的对应关系。相似性理论可以将空间中的大尺度运动缩小到地面实验环境中的小尺度运动,而不改变其运动规律,即地面实验中的运动规律完全对应于空间中航天器的真实相对运动。
2 航天器相对运动地面动力学实验建立相似性理论能够建立航天器相对运动地面动力学实验与航天器空间真实相对运动之间的相似对应关系,进而指导地面实验方案的建立。但是地面实验环境与空间环境存在动力学条件上的差异,这种不同主要表现在地面重力环境与空间微重力环境之间的重力差异以及地面惯性实验环境与空间非惯性力学环境间的惯性力差异,在建立航天器相对运动地面动力学实验的过程中主要体现为动力学方程上的差异。
2.1 力学环境构建如何利用地面实验设备消除航天器相对运动地面动力学实验与空间相对运动之间的力学环境差异是地面实验开始之前必须解决的问题。在一般性的动力学实验中,需要利用实验设备模拟系统原型的力学环境,进而使得实验模型与系统原型之间满足力学相似条件。对于航天器相对运动地面动力学实验而言,需要利用地面实验设备做到以下两点,方能使得航天器相对运动地面动力学实验与空间航天器真实相对运动之间满足动力学相似:①平衡卫星模拟器重力,建立微重力环境;②施加额外作用力以补偿惯性力。
在此利用气浮平台系统建立航天器相对运动地面动力学实验。图 1为实验过程中使用的气浮平台系统实物图,该实验系统主要由大理石实验平台以及卫星模拟器两部分组成。

|
| 图 1 气浮平台实验系统 Fig. 1 Air-floating testbed employed for experiment |
实验过程中卫星模拟器通过平面气浮轴承悬浮于大理石实验平台上,为航天器相对运动地面动力学实验提供理想的微重力实验环境[11]。同时卫星模拟器能够通过喷射气瓶中的压缩气体实现对空间中航天器惯性力的补偿。需要特别指出的是该套地面实验设备的最长实验时间为30 min,这在一定程度上限制了周期比例因子的选择,同时气浮平台尺寸为5 m×8 m,这在一定程度上限制了位置比例因子的选择。
2.2 航天器相对运动动力学方程航天器相对运动动力学方程建立在目标航天器轨道坐标系中,该坐标系原点在目标航天器质心,z轴指向地球球心;x轴在轨道平面内,垂直于地心与目标航天器质心连线,向前;y轴垂直于轨道平面,向右。该相对运动方程最早由Hill提出故也被称为Hill方程[12],其适用范围要求目标航天器在圆轨道或近圆轨道上运动,且不考虑摄动。在航天器相对运动过程中,两航天器的相对距离相对于其轨道高度非常小,两航天器所受到的摄动力如非球形引力摄动、第三体引力摄动、太阳光压摄动和大气引力摄动等大小和方向都基本相同,在得到相对运动方程时两者相减可以抵消。在不考虑摄动的情况下,相对运动方程的具体表达式为[13-14]

|
(4) |
式中:xr、yr、zr为主动航天器在目标航天器轨道坐标系中的相对位置;ω为目标航天器的轨道角速度;arx、ary、arz为主动航天器控制加速度在目标航天器轨道坐标系3个轴上的分量。
为了便于区分空间相对运动与航天器相对运动地面动力学实验过程中的各个变量,本文中下标r代表空间中航天器相对运动的变量,下标t代表航天器相对运动地面动力学实验过程的变量。为表述方便将式(4)改写成矩阵形式,得到式(5)所示的航天器相对运动方程:
|
(5) |
式中:

|

|
式(5)所示方程即为描述航天器相对运动的动力学方程。在航天器相对运动地面动力学实验中,需要在地面实验环境下建立与式(5)满足相似关系的动力学实验。
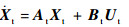
2.3 航天器相对运动地面动力学实验动力学方程对于航天器相对运动地面动力学实验而言,其卫星模拟器的运动与其所受到的作用力之间的关系满足经典的牛顿力学关系,为了与式(5)对应,将地面实验动力学方程写成
|
(6) |
式中:
|
式中:Xt为卫星模拟器的状态;Ut为卫星模拟器所受到的控制加速度。
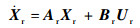
由于地面实验时间与实验尺寸受到实验环境的限制,故需要利用位置比例因子与周期比例因子建立真实空间中长时间、大尺度的空间相对运动与地面实验环境中的短时间、小尺度的地面实验体运动之间的对应关系,进而得到

|
(7) |
式中:
|
为了能够在地面环境下建立航天器相对运动地观动力学实验,需要在实验环境中建立与空间相似的力学环境,故将式(6)改写成

|
(8) |
式中:
|
式(8)即为航天器相对运动地面动力学实验的动力学方程,式(8)中等号右边第1项代表航天器相对运动方程的地面实验过程,第2项代表地面实验过程中模拟空间航天器相对运动所需施加的主动控制力,第3项是为了模拟空间中航天器所受惯性力而施加的补偿加速度。
对比式(5)与式(8),可以发现式(8)的前两项与式(5)满足相似关系,这是航天器相对运动地面动力学实验能够开展的前提。两式的区别在于式(8)的最后一项,该项即为地面实验中惯性环境与空间非惯性环境之间差异的体现,故在航天器相对运动地面动力学实验中,需要施加惯性力补偿抵消式(8)中最后一项的影响。
3 地面实验环境干扰因素分析第2节给出利用气浮平台系统建立与空间真实相对运动动力学相似的地面实验方法。然而由于气浮平台系统在实验过程中,不可避免地受到各种干扰因素的影响,这些干扰使得地面实验结果与空间相对运动之间的相似性对应关系受到影响,进而影响地面实验结果的可信度。本节将会针对气浮平台系统各个干扰因素进行详细的分析,并建立主要干扰力的动力学模型,从而为建立航天器相对运动地面动力学实验中的补偿系统打下基础。
3.1 实验环境干扰力地面实验环境干扰力应在航天器相对运动地面动力学实验开始前予以考虑,例如将气浮平台系统安放于建有隔震地基的地面上以减小地面震动带来的干扰;实验过程中须保证实验场所密闭以减少空气流动以及实验环境温度、湿度变化引起的干扰。上述手段能够将实验环境干扰控制在一定范围内。对于航天器相对运动地面动力学实验而言,实验环境干扰力的影响基本可以忽略。
3.2 侧向干扰力气浮平台系统的侧向干扰力主要来源于两方面:一是大理石气浮平台台面的粗糙度引起的摩擦阻力,二是大理石气浮平台台面的水平度引起的侧向干扰力[15]。本文所使用的气浮平台系统工作时,平面气浮轴承与大理石平台之间的气膜厚度约为15 μm,测量结果显示平台粗糙度最大误差3.10 μm,小于气膜厚度,故可以认为卫星模拟器与气浮平台之间不会存在摩擦力。
在航天器相对运动地面动力学实验开始之前,需要对气浮平台进行调平,从而确保实验平台的水平从而减小侧向干扰力的影响。如果实验平台的平面并非完全水平,则卫星模拟器在自身重力作用下会产生如图 2所示的侧向干扰力fL。图中:mt为地面实验卫星模拟器质量;g为重力常数;αt为平台倾角。

|
| 图 2 气浮平台侧向干扰力示意图 Fig. 2 Schematic diagram for lateral disturbance force of air-floating testbed |
通过分析得到侧向干扰力大小为

|
(9) |
本文中所使用的气浮平台采用两个辅助支撑点支撑,3个主动支撑点用螺纹机构调节平台水平,经电子水平仪校准后平台倾角小于10 μm/m。
3.3 气体黏性摩擦阻力在卫星模拟器运动时,平面气浮轴承与气浮平台之间存在一层气膜,由于气体具有黏性,则运动时必然受到气膜的黏性摩擦阻力,其表达式为
|
(10) |
式中:μ为动力黏度,本实验系统使用压缩空气,黏度值为18.448 ×10-6Pa·s;Af为平面气浮轴承面积,其值为0.004 m2;vt为卫星模拟器运动速度,一般情况下,要求卫星模拟器在气浮平台上的运动速度vt < 5 cm/s;h为平面气浮轴承与气浮平台之间的气膜厚度。
3.4 迎风阻力卫星模拟器在运动的过程中,将受到迎风阻力的影响,迎风阻力的表达式为
|
(11) |
式中:ρ为空气密度,其值为1.205 kg/m3;As为卫星模拟器的迎风面积,经实验测得该套地面实验系统所用卫星模拟器迎风面积为0.26 m2;Cd为空气阻力系数,其值为0.48。
3.5 冷气推力误差在航天器相对运动地面动力学实验中,卫星模拟器需要利用自身冷气推力系统模拟空间中航天器的控制力,与此同时,该冷气推力系统也用于补偿惯性力。由于冷气推力系统的控制阀门存在一定的时延现象,故需要对冷气推力系统的推力偏差进行分析。图 3为冷气推力系统提供100 mN推力情况下的实测推力以及仿真推力的变化图。实验过程中,在100 ms时给定冷气推力系统持续500 ms的开启指令,并要求冷气推力系统输出100 mN的额定推力。

|
| 图 3 冷气推力系统实验与仿真结果 Fig. 3 Experiment and simulation results of gas propellant system |
由于冷气推力系统是通过电磁阀门控制气体流动从而产生气体推力的推进系统,故在使用过程中电磁阀门的开启与关闭均会产生一定的延时,同时从电磁阀门动作到气体充满管路并产生推力也会经过一定的时间。考虑上述影响因素,本文采用延时环节加惯性环节来模拟冷气推力系统的工作过程,其中电磁阀门延时可以取电磁阀门标定动作时间10 ms,惯性环节时间常数τ通过实验方法测得其值为18.5 ms。从图 3中可以看到,利用前述方法建立的仿真推力与实测推力符合较好。
4 航天器相对运动地面动力学实验控制航天器在空间运行的过程中会受到各种摄动力的影响,从而对相对运动构型造成影响。一般情况下,需采用闭环反馈控制保证航天器相对运动构型的稳定。对于航天器相对运动地面动力学实验而言,地面实验环境亦存在诸多干扰因素,需要建立一种实时反馈控制以保证地面实验结果的正确性。
本节将利用线性二次型最优控制理论建立空间中真实航天器的控制策略,而后利用动力学相似准则建立航天器相对运动地面动力学实验的控制策略,并给出针对地面实验干扰力的补偿策略。
4.1 真实航天器相对运动控制策略假设在真实空间中,理想情况下航天器的相对运动状态为

|
(12) |
实际情况下航天器的相对运动状态为

|
(13) |
将式(13)与式(12)分别代入式(5)并相减后得到
|
(14) |
式中:
|
进而得到控制系统的控制方框图如图 4所示。图中:fs代表航天器相对运动过程中各种摄动力的影响;K为反馈增益矩阵,对于控制系统而言反馈增益矩阵K是决定控制系统性能的关键参数。在此利用二次型最优控制算法求解反馈增益矩阵K。

|
| 图 4 控制系统方框图 Fig. 4 Control system block diagram |
最优控制问题中有一类被称为线性二次型最优控制问题,即LQR问题。该问题可以描述为:对于式(14)所示的系统,设计控制律使得如下二次型连续时间代价函数最小[16]。

|
(15) |
式中:半正定对称矩阵Q代表跟踪误差加权矩阵;正定对称矩阵R代表控制矩阵。线性系统的LQR控制律的设计步骤如下:首先求解式(16)所示的黎卡提方程式,得到矩阵P,若正定矩阵P存在,则表示系统是稳定的[17]。

|
(16) |
求解黎卡提方程后,可以得到其对应的系统反馈增益矩阵:

|
(17) |
最后得到作用于主动航天器的控制加速度。

|
(18) |
航天器相对运动地面动力学实验目的在于建立与空间航天器相对运动满足动力学相似的地面实验,故地面实验中所使用的控制策略与控制方法必须与空间中航天器所采用的控制方法相同。
在航天器相对运动地面动力学实验中,卫星模拟器所受到的作用力主要有两种:第1种作用力是地面实验环境所带来干扰力,包括前述的环境干扰力Fe、侧向干扰力fL、气体黏性摩擦阻力Fμ以及迎风阻力Fd;第2种是卫星模拟器上冷气推力系统提供的推力,冷气推力系统是卫星模拟器主动控制力的唯一来源,在航天器相对运动地面动力学实验中冷气推力系统需要对实验体施加3种作用力。
1) 地面实验控制力
首先,冷气推力系统需要提供相对运动实验的控制力,为了保证航天器相对运动地面动力学实验与空间真实相对运动的动力学相似性关系,地面实验系统需要使用与空间相对运动完全相似的控制策略,故航天器相对运动地面动力学实验过程中的控制加速度为

|
(19) |
由式(19)可以看到,地面实验所使用的控制策略与空间真实相对运动的控制策略完全相同。
2) 地面实验惯性补偿力
由于航天器地面实验与空间真实相对运动之间存在动力学差异,故需要冷气推力系统对惯性力进行补偿。
由式(8)可知,所需的惯性补偿力为

|
(20) |
3) 地面实验干扰补偿力
冷气推力系统还需要对地面实验环境中的部分干扰力进行补偿。对干扰力的补偿是所有地面动力学实验的难点,这是由于干扰力作用形式复杂、不易计算与测量,故其补偿难度较大,补偿精度较低。本文所考虑的4种干扰力中,环境干扰力Fe与侧向干扰力fL均为实验环境中固有的干扰力,在实验过程中干扰力的大小与方向均呈现随机变化,实验过程中无法计算与测量,故无法对其进行相应的补偿,只能在实验开始之前加以考虑,减小其对地面实验的影响。气体黏性摩擦阻力Fμ以及迎风阻力Fd都是由于卫星模拟器在气浮平台上运动产生的阻力,故可以通过冷气推力系统进行补偿,相应的气体黏性摩擦阻力的补偿力Ftμ以及迎风阻力的补偿力Ftd的表达式分别为
|
(21) |
|
(22) |
式中:Lv为速度转换矩阵,其具体表达式为

|
在建立了航天器相对运动地面动力学实验中所需要控制力及各种补偿力的模型之后,可以建立航天器相对运动地面动力学实验的控制系统方框图,如图 5所示。从图中可以看出,地面实验控制系统需要补偿卫星模拟器的惯性力以及地面实验中的部分干扰力,并提供与空间相对运动满足动力学相似关系的控制力,这些作用力均是通过冷气推力系统加以实现的。假设航天器相对运动地面动力学实验中,补偿力能够精确补偿卫星模拟器所受到的干扰力,则地面实验控制系统与航天器相对运动的控制系统满足动力学相似关系。然而由于地面实验环境中的干扰往往无法做到精确补偿,加之地面实验所使用的冷气推力系统不可避免地存在时延现象,故航天器相对运动地面动力学实验结果不可能与空间真实相对运动满足完全相似的对应关系。

|
| 图 5 航天器相对运动地面动力学实验控制系统方框图 Fig. 5 Control system block diagram for ground-based astrodynamical experiment for spacecraft relative motion |
本节以空间航天器相对运动为系统原型,建立航天器相对运动地面动力学实验系统模型,而后利用数值仿真技术模拟地面动力学实验结果并与真实地面实验结果进行对照,最后建立航天器相对运动地面动力学实验的相似性度量函数,并利用这一函数证明地面实验结果的可信性。由文献[18]可知,在无外力作用的情况下,式(5)存在式(23)所示的解析解。
|
(23) |
主动航天器相对于目标航天器初始状态为

|
在设计航天器相对运动构型时,为避免航天器相对运动的发散,令式(23)中长期项为零,得到

|
(24) |
将式(24)代入式(23),从而获得稳定的相对运动规律:
|
(25) |
从式(25)中可以看到,满足式(24)要求的航天器在相对运动过程中,x方向的运动距离与速度均为z方向的2倍[19],故航天器在xz平面上的相对运动轨迹投影为偏心率e=0.866的封闭椭圆。由于y方向上的运动是简谐振动且与x、z方向上的运动解耦。故在地面实验中可以不考虑y方向的运动,仅对xz平面上的运动进行模拟。如果航天器的初始条件进一步满足式(26),则椭圆的中心为目标航天器。

|
(26) |
利用上述推导可以设计满足长期稳定性要求的椭圆绕飞轨迹。表 2给出的理想初始状态对应的相对运动轨迹为xz平面内半长轴为50 m、偏心率为0.866的封闭椭圆。
| 航天器 | 参数 | 数值 |
| 目标航天器 | 半长轴/km | 7 171 |
| 偏心率 | 0 | |
| 轨道倾角/(°) | 90 | |
| 升焦点赤经/(°) | 70.3 | |
| 近地点幅角真近点角/(°) | 120 | |
| 轨道角速度/(rad·s-1) | 0.001 | |
| 轨道周期/h | 1.681 2 | |
| 主动航天器 | 理想初始相对位置x0/m | 0 |
| 理想初始相对位置z0/m | 25 | |
| 理想初始相对速度vx0/(m·s-1) | -0.519 | |
| 理想初始相对速度vz0/(m·s-1) | 0 | |
| 实际初始相对位置x0/m | 10 | |
| 实际初始相对位置z0/m | 0 | |
| 实际初始相对速度vx0/(m·s-1) | 0 | |
| 实际初始相对速度vz0/(m·s-1) | 0 |
在航天器相对运动的过程中,主动航天器初始状态可能不满足编队构型的需求。假设初始时刻航天器为表 2中实际初始状态,则需要利用航天器控制系统能够快速完成对初始状态误差的修正,从而完成相应的航天器相对运动任务。
下面将以表 2中的航天器相对运动为例,利用第1节和第2节相似性理论结合现有的地面实验设备建立航天器相对运动地面动力学实验方案。
5.1 实验方案使用图 1所示的气浮平台系统建立航天器相对运动地面动力学实验方案,该实验系统的详细参数如表 3所示。
| 实验系统 | 物理量 | 限制条件 |
| 实验环境 | 实验空间/m2 | 5×8 |
| 实验时间Tt/min | < 30 | |
| 卫星模拟器系统 | 质量mt/kg | 86 |
| 迎风面积As/m2 | 0.26 | |
| 阻力系数Cd | 0.48 | |
| 气浮轴承面积Af/m2 | 0.004 | |
| 实验平台系统 | 气膜厚度h/μm | 15 |
| 平台倾斜度/(μm·m-1) | < 10 | |
| 冷气推力系统 | 延时时间/ms | 10 |
| 惯性环节时间常数τ/ms | 18.5 | |
| 推力精度/mN | < 5 | |
| 最大推力Fmax/N | 5 | |
| 测量系统 | 位置测量误差/mm | < 10 |
| 速度测量误差/(mm·s-1) | < 1 | |
| 采样时间/ms | 10 |
考虑表 2中航天器相对运动轨迹其最大距离为半长轴的2倍,同时完成椭圆相对运动轨迹需要的时间为一个轨道周期,对比表 3中的实验环境参数,在实验过程中需预留0.5 m的安全余量以及5 min的实验准备时间,进而得到该实验的位置比例因子与周期比例因子:

|
(27) |
在得到位置比例因子与周期比例因子后,可以建立相应的航天器相对运动地面动力学实验方案。假设地面动力学实验中的等效偏差状态为

|
(28) |
地面实验中控制系统参数为
|
(29) |
利用数值仿真方法可以得到理想情况下航天器相对运动地面动力学实验中卫星模拟器的运行轨迹如图 6中虚线所示。从图 6中实验轨迹以及仿真轨迹均可以看出,前述控制方法能够有效地控制航天器相对运动轨迹,快速消除初始误差对于航天器相对运动的影响。仿真结果显示卫星模拟器最大运行速度为26.3 mm/s,地面实验中最大运行速度为25.8 mm/s,满足地面实验系统中对于卫星模拟器最大速度的要求。数值仿真的计算结果可以被认为是理想情况下地面实验的实验结果。

|
| 图 6 航天器相对运动地面动力学实验结果及数值仿真 Fig. 6 Experimental result and numerical simulation of spacecraft relative motion's ground-based astrodynamical experiment |
所谓的理想情况是指地面实验中各种干扰力均被精确补偿,从而不会对航天器相对运动地面动力学实验结果产生影响,这与数值仿真的假设条件完全相同,故将数值仿真结果作为理想情况下的地面实验是合理的。数值仿真及地面实验中的卫星模拟器位置偏差、速度偏差以及所需的控制加速度如图 7所示。从图 7中数值仿真部分可以看到,卫星模拟器在控制系统的作用下,50 s时其位置偏差小于1 cm,速度偏差小于1 mm/s,控制结果收敛。为便于观察,图 7中仅截取前70 s的仿真计算结果。由图 7中控制加速度可知,该航天器相对运动地面动力学实验方案所需的最大加速度发生在初始时刻,这是由于初始时刻的状态偏差最大,故需要施加的控制加速度也最大。实际上地面实验系统的冷气推力系统需要为卫星模拟器提供控制力以及惯性补偿力,故其变化规律与实验所需的控制加速度之间并不满足正比关系,但是相比于控制力,各种补偿所需的推力很小,故冷气系统与控制加速度变化规律基本一致。

|
| 图 7 地面实验结果与数值仿真结果的偏差及控制力变化 Fig. 7 Result errors and control forces of spacecraft relative motion's ground-based astrodynamical experiment and numerical simulation |
从图 7中地面实验冷气推力系统推力变化可以看到,航天器相对运动地面动力学实验所需最大冷气推力为2.41 N,小于冷气推力系统能够提供的最大推力,故该地面实验方案可行。
在真实的地面实验环境中,卫星模拟器会受到各种干扰因素的影响。现有的航天器相对运动地面动力学实验中虽然引入了干扰力补偿系统,但是无法做到对各种干扰力的精确补偿。进而导致真实地面实验结果与理想地面实验结果之间产生差异。图 8为真实地面实验结果与理想地面实验结果之间的差异变化图,为了与图 7相对应,图 8中同样只仅给出前70 s的差异变化。

|
| 图 8 航天器动力学实验结果误差 Fig. 8 Error of spacecraft relative motion's ground-based astrodynamical experiment result |
图 8中位置误差、速度误差以及控制加速度误差均为地面实验实际结果与理想地面实验结果之间的误差。实验过程中最大位置误差2.8 cm,最大速度误差7 mm/s。可以看到真实地面实验过程中卫星模拟器位置与速度均与理想情况下的实验结果偏差不大,由此也再次证明了该航天器相对运动地面动力学实验方案的可行性。图 8中卫星模拟器位置、速度以及加速度误差,主要来源于实验过程中各种干扰力的作用,同时由于实验观测设备精度所限,也会产生一部分观测误差。
5.2 实验结果可信性分析虽然在控制系统的作用下,地面实验轨迹收敛于理想轨迹,但是由于航天器相对运动地面动力学实验中,很多干扰因力的作用呈现随机性,故地面实验过程中的误差不会收敛,需要不断利用控制系统修正这一部分误差,故而地面实验结果可信度如何是地面实验结果分析的关键。对于航天器相对运动地面动力学实验而言,本文建立一种相似性度量函数,用于衡量地面实验结果满足相似性要求的程度,从而证明地面实验结果的可信性。度量地面实验结果的可信程度,实际上就是量化地面实验模型与空间真实相对运动之间的相似性差异。差异越小,则地面实验与空间真实运动之间的相似度越高,进而地面实验过程越贴近真实情况,相应的地面实验结果的可信度越高。在此利用比例因子坐标系中地面实验模型与空间真实运动之间的距离函数作为相似性度量函数衡量地面实验的相似性程度。其表达式为
|
(30) |
式中:t0为地面实验的开始时间;tf为地面实验的结束时间;t为当前实验时间;n为实验中测量状态的个数;Si为t时刻第i个状态变量理想情况下的比例因子值;λi(t)为t时刻实验过程中第i个状态变量的比例因子值。式(30)的物理意义如图 9所示。为便于理解,图 9中仅取位置比例因子与速度比例因子加以说明。

|
| 图 9 比例因子坐标系视图 Fig. 9 Coordinate system of scaling factors |
在图 9所示的比例因子坐标系中,与航天器真实相对运动完全相似的理想地面实验其比例因子为常值,对应图 9中的点S0。然而真实地面实验结果无法满足完全相似这一条件,故其比例因子不再是一个固定的点,而是变成了一条随时间变化的曲线,即图 9中的Se(t)。图 9中的d(t)代表t时刻航天器相对运动地面动力学实验与理想地面实验之间比例因子坐标系中的“距离”,这一“距离”可以用来衡量t时刻地面实验满足相似性的程度,相似性程度越高则“距离”越小。对时间t进行积分即得到式(30)所示的相似性度量函数,这一函数可以反映出整个航天器相对运动地面动力学实验与空间真实运动之间的相似性程度。如果地面实验过程与空间真实运动满足完全相似关系,则Se(t)不随时间变化且与S0重合,对应的相似性度量函数的值为零。换而言之,航天器相对运动地面动力学实验的相似性度量函数值越大则其与航天器空间真实相对运动情况的相似性越差,对应的其实验结果可信性越低。
航天器相对运动地面动力学实验中,需要对卫星模拟器的位置[xt, zt]与速度[vxt, vzt]共4个状态变量进行测量。在建立相似性度量函数时,可以选用极坐标代替直角坐标,这是由于极坐标中的4个状态量均具有不同的量纲,能够综合地反映出航天器相对运动地面动力学实验的相似性程度。极坐标下状态变量与直角坐标下状态变量之间的转换关系为

|
(31) |
对应的,采用极坐标的航天器相对运动地面动力学实验的相似性度量函数为
|
(32) |
式(32)综合衡量了航天器相对运动地面动力学实验中的位置比例因子、角度比例因子、速度比例因子以及角速度比例因子的偏差,能够综合地评定地面实验结果与空间真实运动之间的相似性程度。需要注意的是,该相似性度量函数没有单位,但是其具有明确的物理意义。经过计算,得到在表 2所给出的地面实验系统内,其实验结果的相似性度量函数值为3.57×10-6,由此可见该航天器相对运动地面动力学实验的相似性程度较高,其结果可信度也较高。
假设地面实验结果与数值仿真结果之间误差为最大测量误差,则对应的地面实验结果的相似性度量函数值为

|
(33) |
式中:λAmax(t)代表t时刻完全相似模型由最大测量误差所引起的物理量A的比例因子偏差。式(33)物理意义表征满足动力学相似条件的航天器相对运动地面动力学实验所得到的最大相似性度量函数值,故可以认为小于这一值的地面实验均为可信的。利用表 2中的测量误差可以得到Qmax的值为2.73×10-3。对比航天器相对运动地面动力学实验的相似性度量函数值Q与Qmax,可以认为航天器相对运动地面动力学实验与航天器空间相对运动运动之间相似性关系满足较好,故地面实验结果可信。
6 结论1) 建立了航天器相对运动地面动力学实验方案,该实验方案考虑了实验环境及实验设备对于实验过程的限制,得到的实验方案具有可行性。
2) 分析了航天器相对运动地面动力学实验过程中的干扰力,建立了干扰力的数学模型,并提出了相应的补偿措施。
3) 建立了航天器相对运动地面动力学实验控制策略,该策略能够有效控制地面实验过程,实验过程位置误差优于2.5 cm,速度误差优于1.97 mm/s。
4) 利用相似性理论建立了航天器相对运动地面动力学实验结果可信性分析流程,并得到地面实验结果的可信性分析结果。
本文所建立的实验结果可信性分析流程同样适用于其他航天器地面实验结果的分析。
| [1] | REZAEEPAZH J, YAZDI A. Similitude requirements and scaling laws for flutter prediction of angle-ply composite plates[J]. Composites:Part B, 2010, 42 (1) : 51 –56. |
| [2] | TORKAMANI S, NAVAZI H M, JAFARI A A. Structural similitude in free vibration of orthogonally stiffened cylindrical shells[J]. Thin-Walled Structure, 2009, 47 (11) : 1316 –1330. DOI:10.1016/j.tws.2009.03.013 |
| [3] | AKIN D L, HOWARD R D.Telerobotic operations testing in neutral buoyancy simulation[C]//Proceedings 4th Annual Conference on Intelligent Robotic Systems for Space Exploration.Piscataway, NJ:IEEE Press, 1992:42-49. |
| [4] | SINGER S M, AKIN D L. Scheduling robot task performance for a cooperative human and robotic team[J]. Acta Astronautica, 2010, 66 (1-2) : 102 –116. DOI:10.1016/j.actaastro.2009.05.011 |
| [5] | 崔俊峰, 冯咬齐, 于丹, 等. 航天器动力学环境试验综合测试系统的设计[J]. 计算机测量与控制, 2006, 20 (3) : 363 –364. CUI J F, FENG Y Q, YU D, et al. The design of intergrated measurement system for spacecraft dynamic environment testing[J]. Computer Measurement and Control, 2006, 20 (3) : 363 –364. (in Chinese) |
| [6] | 李大琪, 沈均毅, 陈宏敏. 航天员呼吸强度的时序模式相似性比较研究[J]. 宇航学报, 2008, 29 (3) : 971 –976. LI D Q, SHEN J Y, CHEN H M. Study on similarity comparison of sequential pattern of astronaut's respiratory intensity[J]. Journal of Astronautics, 2008, 29 (3) : 971 –976. (in Chinese) |
| [7] | WAKI H, SHIMIZU T, KATAHIRA K, et al. Effects of microgravity elicited by parabolic flight on abdominal aortic pressure and heart rate in rats[J]. Journal of Applied Physiology, 2002, 93 (6) : 1893 –1899. DOI:10.1152/japplphysiol.01064.2001 |
| [8] | 何兆伟, 师鹏, 葛冰, 等. 航天器地面实验的相似性分析方法[J]. 北京航空航天大学学报, 2012, 38 (4) : 502 –508. HE Z W, SHI P, GE B, et al. Similitude investigation for ground experiment of spacecraft[J]. Journal of Beijing University of Aeronautics and Astronautics, 2012, 38 (4) : 502 –508. (in Chinese) |
| [9] | 周美立. 相似性科学[M]. 北京: 科学出版社, 2004 : 81 -154. ZHOU M L. Similarity science[M]. Beijing: Science Press, 2004 : 81 -154. (in Chinese) |
| [10] | BARNETT R, CHRISTOPHER T. Similarity[M]. New York: McGraw-Hill Professional, 2013 : 35 -73. |
| [11] | JANA L S, MASON A P, CHRISTOPHER D H. Historical review of air-bearing spacecraft simulators[J]. Journal of Guidance, Control, and Dynamics, 2003, 26 (4) : 513 –522. DOI:10.2514/2.5085 |
| [12] | GINN J S. Spacecraft formation flight:Analysis of the perturbed J2-modified Hill-Clohessy-Wiltshire equations[J]. Aerospace Engineering, 2007, 3 (3) : 193 –198. |
| [13] | 赵育善, 师鹏. 航天器飞行动力学建模理论与方法[M]. 北京: 北京航空航天大学出版社, 2004 : 181 -189. ZHAO Y S, SHI P. Theory and method for spacecraft flight dynamics modeling[M]. Beijing: Beihang University Press, 2004 : 181 -189. (in Chinese) |
| [14] | WIGBERT F. Automated rendezvous and docking of spacecraft[M]. Cambridge: Cambridge University Press, 2003 : 342 -381. |
| [15] | 许剑, 任迪, 杨庆俊, 等. 五自由度气浮仿真试验台的动力学建模[J]. 宇航学报, 2010, 31 (1) : 60 –64. XU J, REN D, YANG Q J, et al. Dynamic modeling for the 5-DoF air bearing spacecraft simulator[J]. Journal of Astronautics, 2010, 31 (1) : 60 –64. (in Chinese) |
| [16] | 姜静, 孟利东. 线性二次型最优控制器的设计[J]. 软件工程与应用, 2014, 3 (13) : 97 –103. JIANG J, MENG L D. The design of linear quadratic optimal controller[J]. Software Engineering and Applications, 2014, 3 (13) : 97 –103. (in Chinese) |
| [17] | HERNANDEZ O, ORTIZ P, HERRERA J. Fractional PID controller with LQR proportional action applied to fractional model of cement rotary kiln[J]. Latin America Transactions IEEE, 2015, 13 (1) : 37 –42. DOI:10.1109/TLA.2015.7040625 |
| [18] | LOVELL T A, SPENCER D A. Relative orbital elements formulation based upon the Clohessy-Wiltshire equations[J]. Journal of the Astronautical Sciences, 2015, 17 (1) : 270 –278. |
| [19] | 李保军, 师鹏, 张皓, 等. 卫星编队的多脉冲队形重构方法[J]. 北京航空航天大学学报, 2009, 35 (8) : 950 –952. LI B J, SHI P, ZHANG H, et al. Satellites formation reconfiguration with multiple impulses[J]. Journal of Beijing University of Aeronautics and Astronautics, 2009, 35 (8) : 950 –952. (in Chinese) |