



2. 中国兵器工业计算机应用技术研究所, 北京 100089
2. North Institute of Computer Application, Beijing 100089, China
随着无人机(UAV)技术的快速发展,其应用越来越广泛,在气象观测、农业耕作、治安监控、军事侦察和人员营救等领域都有着广阔的应用前景[1, 2, 3]。在许多应用中,无人机与地面控制系统间有大量的观测、控制数据需要实时传输,为了保证数据收发准确可靠,同时提高接收增益和抗干扰能力,这种远距离、高带宽的通信通常采用定向天线[4, 5]。定向天线工作时,只有发射天线和接收天线主瓣对准时,才有较高的增益[6, 7, 8]。如果不能保证定向天线实时对准,将使无人机与地面控制系统间信号中断,这不仅会丢失观测数据,影响任务的完成,还会造成无人机的失控,可能导致无人机丢失、坠毁等严重事故,因此,需要保证定向天线实时对准。实现定向天线对准跟踪主要有人工跟踪和自动跟踪。人工跟踪存在误差大、实时性差等不足。自动跟踪是定向天线根据目标的运动,自动实现对目标的跟踪,是目前主要的跟踪方式[5, 7]。根据目标角确定方法的不同,定向天线自动跟踪(以下简称定向天线自跟踪)可分为2种主要方式:①最常用的是通过信号相位关系来进行目标角判断,这需要一套复杂的天线伺服反馈系统,成本很高,此外,该方法抗干扰能力较差;②利用无人机实时发送给地面站的GPS位置信息,根据无人机和定向天线的相对位置来确定跟踪目标角。由于GPS位置信号具有比前者跟踪信号更加稳定、实现简单等特点,因此,两者相比,后者更有优势[8]。但在研制过程中,发现此方法存在以下不足:根据无人机和定向天线的相对位置来确定跟踪目标角,目前有多种方法,但或为了降低计算的复杂性,进行了简化处理[5, 7, 9],或在计算中需要根据定向天线和无人机的相对位置来判断真实的方位角所在象限,在象限边界处容易引起歧义,增加了控制系统实现的复杂度[6, 8, 10, 11]。由于通信链路传输能力以及低成本GPS接收机动态特性的限制,通常无人机发送给地面控制系统的位置更新频率较低,在近距离跟踪时,跟踪角度变化波动较大,容易造成跟踪系统运动波动和较大的跟踪误差,显著增加系统磨损。随着无人机的广泛应用,在许多应用领域需要定向天线自跟踪系统具有机动跟踪能力,以提高系统的机动性和隐蔽性。但在机动过程中,定向天线的GPS位置信息容易受隧道、树木和建筑等干扰,造成位置信息不准,从而导致跟踪目标丢失。
本文设计并研制了以无人机和定向天线相对位置作为跟踪引导,具有机动跟踪能力的定向天线自跟踪系统。阐述了定向天线自跟踪系统工作原理,提出了一种基于相对位置计算目标角的新方法,与现有方法相比,其更易于工程实现。该方法不仅可以用来实现对飞机的自动跟踪,还可广泛应用于已知相对位置的汽车、导弹等自动跟踪。随着GPS定位系统的广泛应用,特别是中国北斗定位系统的快速发展,该方法的应用越来越广泛。对由于GPS位置信息干扰导致目标无人机丢失,以及近距离自动跟踪和过顶跟踪过程中存在运动波动、跟踪误差较大和系统磨损严重等一些实际问题进行了讨论,提出了解决方案。对控制系统的硬件电路和软件设计进行了详细描述。测试和应用结果表明:研制的定向天线具有机动跟踪能力和较高的跟踪精度,运行平稳,能够满足定向天线对无人机跟踪的需要。
1 系统组成及工作原理 1.1 系统组成定向天线自跟踪系统主要由主控制器、GPS接收机、电机驱动电路、电机及减速器、方位和俯仰角测量仪、人机交互操作面板、无人机地面控制系统、角度传感器和机械本体等组成,如图 1所示。整个系统核心部分是由主控制器、电机驱动电路、GPS接收机和角度传感器等构成的定向天线自跟踪系统的控制系统。控制系统的主要功能是接收无人机和定向天线的位置、速度等信息,计算天线目标角和当前角,运行控制算法驱动电机等。为了满足不同工作需求,且方便使用,定向天线有多种工作模式,如自动跟踪、手动跟踪、预置位设置和快速搜索等。人机交互操作面板是人机交互接口,通过该面板可以实现定向天线工作模式切换、手动跟踪等操作。定向天线的位置信息和速度信息是通过GPS接收机来获取的,无人机的位置信息和速度信息通过无人机地面控制系统中的数据链接收,并转发给定向天线控制系统。方位和俯仰角测量仪测量载车的当前方位和俯仰角,而控制系统中角度传感器测量的方位和俯仰角则是定向天线相对于载车且需要结合载车当前角度才能获取的定向天线需要转动的相对角度。电机驱动电路是把主控制器生成的电机指令转换为驱动电机的实际信号。

|
| 图 1 定向天线自跟踪系统组成 Fig. 1 Directional antenna automatic tracking system composition |
自动跟踪时,控制系统根据定向天线和无人机的当前位置信息和速度信息计算出定向天线的目标方位角、俯仰角以及定向天线和无人机两者的相对速度。利用载车的方位与俯仰角,结合角度传感器测量值,计算出定向天线的当前方位与俯仰角。控制系统根据当前角与目标角,按照一定的控制算法,驱动电机平稳、快速地到达目标位置,即目标角,从而实现定向天线对目标无人机的自动跟踪。速度信息主要是用来对位置进行预测平滑和实现无人机飞过定向天线顶点时对方位运动增加前馈的判断条件。定向天线自跟踪系统利用GPS接收机、方位和俯仰角测量仪实时获取定向天线的当前位置、方位和俯仰角等信息,因此,当定向天线运动时,仍然可以计算出目标角和当前角等信息,从而实现定向天线在运动中对目标的自动跟踪能力。手动跟踪模式与自动跟踪模式的区别在于:手动跟踪时,目标角不是根据无人机位置、速度等信息来计算,而是操作人员通过人机交互操作面板输入的。预置位设置是通过按键实现定向天线转动到预先设定的某一位置,如水平位置、垂直位置等,该功能在一些特殊情况下非常实用,如设备的快速复位、回收等。快速搜索模式是定向天线自动按一定的速度转动,当通信信号强度达到最大位置时,自动锁定该位置,从而实现对目标的搜索。
2 目标角的计算为了方便工程中的应用,规定系统方位角以正北为0°,顺时针方向为[0,π],逆时针方向为[0,-π]。规定俯仰角水平面以上为正,水平面以下为负,如图 2所示。图中:C表示定向天线当前位置;N轴为北向;E轴为东向;D轴为当地垂线向下方向。

|
| 图 2 角度方向 Fig. 2 Definition of angles |
目标方位角ψT、载车方位角ψC和天线方位转动角α的关系如图 3所示。图中:T表示无人机当前位置;(LC,λC,hC)和(LT,λT,hT)分别为载车和无人机位置的经度、纬度和海拔高度;PE和PN分别为定向天线与无人机在东向和北向水平距离。


|
| 图 3 方位角关系 Fig. 3 Relationship of azimuth angles |
目标俯仰角θT、载车俯仰角θC和天线俯仰转动角β的关系如图 4所示。图中:PD为定向天线与无人机在垂直方向的距离。


|
| 图 4 俯仰角关系 Fig. 4 Relationship of pitch angles |
目标方位角ψT和目标俯仰角θT的具体计算方法如下:根据GPS接收机获得的定向天线经度、纬度,计算出参考椭球地球模型的子午面曲率半径RN和横向曲率半径RE为[12]
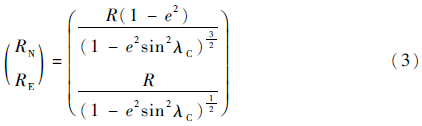
利用式(4)计算出相对距离(PN、PE和PD),就可以利用式(5)计算目标方位角ψT和目标俯仰角θT。

由式(5)计算出的ψT和θT符合本文规定的方位角和俯仰角范围,不存在多样性。采用此方法,无需再通过定向天线和无人机的相对位置来确定目标角的真实值,为工程应用带来了方便。
3 运动控制算法定向天线的运动控制主要采用PID控制器来实现。PID控制器具体设计可参考文献[15, 16, 17],这里不再赘述,仅作简单介绍。本节主要对克服运动波动、减小跟踪误差和系统磨损等一些实际问题 的解决方法进行详细说明。定向天线运动控制框图如图 5所示。

|
| 图 5 定向天线运动控制框图 Fig. 5 Block diagram of control for directional antenna movement |
控制系统根据目标角yT(k)和当前角yC(k)的差值σ(k),采用PID控制器,计算出控制电机驱动指令量PWM和DIR。其中,PWM为脉宽调制信号,用来控制电机运行速度;DIR为一个或高或低的逻辑信号,用来控制电机运行方向,从而实现定向天线的精确位置控制。
通过理论计算和实际测试发现,跟踪目标角度变化剧烈时,由于无人机位置信息更新频率较低,通常为2 Hz,会造成定向天线自跟踪系统运动不连续,波动较大。增加无人机位置信息更新频率是解决问题的一个办法,但这会涉及到数据传输成本,以及飞控系统的修改等实际问题,不易实现。另一种方案是根据无人机具有惯性、其速度不会突变的特点,由速度对无人机位置进行预测。利用该方法不仅可以实现定向天线的运动平滑,还可以在GPS信号不好、定向天线或无人机位置信息丢失时,对目标位置进行预测,避免目标的丢失,从而提高了系统的可靠性。实现该功能的流程如图 6所示。其中,ΔT为预测平滑周期,也是控制周期。

|
| 图 6 位置预测流程 Fig. 6 Flowchart of position prediction |
通常情况下,无人机在定向天线的上方飞行,定向天线伺服系统的最小俯仰角为0°就可满足要求,但考虑到道路的坡度影响,当目标俯仰角小于道路坡度时,就需要定向天线伺服系统能够实现相对于载车平面的向下指向能力。公路的最大纵坡通常不大于9%[18],换算成角度约为5°,因此,把定向天线伺服系统俯仰角的运动范围机械限定最小为-10°,可满足使用要求。被跟踪无人机通常在定向天线的前方飞行,目标俯仰角最大值不超过90°,当无人机在定向天线过顶运动时,可以通过方位角配合来实现俯仰角的对准跟踪。因此,定向天线伺服系统俯仰角的运动范围机械限定为[-10°,+90°],就可以实现对无人机任意方向的跟踪。在过顶运动时,需要由方位角变化180°来配合实现,此时,由于方位角变化较大,系统指向会有较大的滞后。通过速度和距离,可提前预测该运动,增加前馈,使得方位提前运动,把过顶时的方位滞后角最大误差180°分为90°的提前角度误差和90°的滞后角度误差,这样可使方位最大误差减小为原来的一半,过顶前馈原理如图 7所示。

|
| 图 7 过顶前馈原理 Fig. 7 Zenith pass feedforward principle |
不失一般性,假设无人机由西向东匀速飞行,过定向天线顶点,如在顶点A开始实行方位转动,则此时方位最大误差角为180°,方位转动180°的时间设为t,方位转到位时,无人机此时位置设为B点。如无人机在a点时,方位就提前转动,其中aA距离的飞行时间为t/2,即为方位转动90°的时间,则在过顶过程中,方位最大误差为90°,方位转到位时,无人机此时位置为b点,从而实现了方位误差减小。
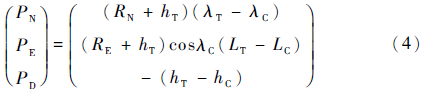
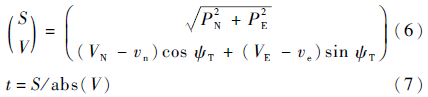
过顶前馈的具体算法如图 8所示。计算无人机与定向天线的水平距离S、水平方向上的相对速度V和到顶时间t分别为

|
| 图 8 过顶前馈算法 Fig. 8 Zenith pass feedforward algorithm |
根据计算值t和相对速度V,按条件t<t0且V<V0进行判断,如符合该条件,则定向天线方位角增加180°,实现方位提前运动。其中t0为定向天线在方位方向上运行90°时的运行时间,V0为设定的速度值,当相对速度大于该值时,系统无需提前运动,只有当相对速度小于该值时,才需要提前运动。V0的取值与定向天线的方位最大运动速度、无人机过顶时高度等因素有关,通常取V0=-30 m/s,可以满足实际要求。
4 系统软硬件设计 4.1 硬件设计系统使用的云台具有水平方位和垂直俯仰2个面上的旋转运动,水平和俯仰结合使用,使定向天线可指向几乎任意方向。为了提高集成度,减少控制系统体积,直流电机驱动电路也集成在控制系统硬件平台上。主要硬件电路原理如图 9所示。图中只给出了1路直流电机的驱动电路,另1路电机的驱动电路与之类似。

|
| 图 9 硬件电路原理 Fig. 9 Hardware circuit principle |
如图 9所示,直流电机驱动电桥采用的是英飞凌公司生产的电机驱动H-Bridge芯片TLE6209R。该芯片的持续电流为6 A,峰值为7 A,工作电压可达40 V,具有过流、空载和短路等诊断和保护功能,有1个标准的SPI接口,通过该接口可以设置工作参数以及诊断信息的输出。只需通过对PWM和DIR 2个控制脚进行控制,就可以实现电机的正转、反转和制动。云台位置反馈测量传感器选用的是R18 SER数字角度传感器(接口为XP3,传感器本身图 9中没有标出),可实现连续旋转,通信接口是只能输出数据的SPI从接口。因此,每路电机驱动电路需要主控制器提供2路SPI接口、1路PWM信号和1路通用IO接口。其中,通用IO接口实现电机方向控制信号DIR的输出。2路电机驱动则总共需要4路SPI接口、2路PWM信号和2路通用IO接口。控制系统对外通信接口是CAN总线,通过该接口,接收无人机地面控制系统转发的无人机位置、速度等信息,以及操作人员通过操作面板发送的各种指令等信息,图 9中SN65HVD235是CAN收发接口芯片。主控制器采用的是美国TI公司生产的微控制器芯片TMS320F2808[19],该芯片有6路高精度PWM输出、4路高速SPI接口、2路CAN接口模块以及高达35个通用IO接口,主频最高支持100 MHz,片上有64 K×16 Flash和18K×16 SARAM,其接口、运算能力和存储空间等都满足系统要求,芯片74ALVC164245用来实现电平转换[20]。
4.2 软件设计控制系统的软件主流程如图 10所示。控制周期一到,首先判断跟踪模式。不同模式的区别主要在于目标角的确定,如是手动模式,目标角由操作者直接输入;如是预置位模式,则目标角已预先确定;如是自动跟踪模式,则目标角由定向天线和目标无人机相对位置确定。在当前控制周期中,如位置没有有效更新,则利用速度进行位置预测,根据位置计算目标角,读取角度传感器值,计算定向天线当前角,并判断无人机是否要经过天线顶点,如是,则增加方位前馈,修正目标角,根据目标角和当前角差值,由控制器计算电机控制量,驱动电机运动,使天线到达目标位置,从而实现天线的自动跟踪。在控制周期的空闲时间,系统完成一些实时性要求不高的工作,如发送当前系统状态等信息给无人机地面控制系统等。

|
| 图 10 软件主流程 Fig. 10 Software main flowchart |
对有无采用速度对位置进行预测平滑2种情况进行测试对比。很明显,无人机与定向天线自跟踪系统距离越近,其跟踪角度变化就可能越剧烈,此时对定向天线自跟踪性能要求也越高。为此,设置飞行半径为100 m,飞行速度为50 m/s,围绕定向天线绕圈飞行的极端情况。为降低测试风险和测试成本,该试验采用飞行仿真系统模拟飞机飞行位置、速度等状况进行测试,试验结果如图 11所示。

|
| 图 11 预测平滑效果 Fig. 11 Smoothing prediction effect |
从图 11中可以看出,没有预测平滑时的跟踪误差角达到了14°~16°,主要是由于飞行器位置更新频率(2 Hz)较低造成的。跟踪角度变化剧烈的极端情况下,飞行器位置更新频率较低时,不仅会带来非常大的跟踪误差角,而且定向天线步进运动明显,不连续,波动大,加大运动部件磨损。平滑后,跟踪误差角限制在2°以内,有效降低了跟踪误差角,运动也连贯平稳了。俯仰运动也有类似的结果。
对有无采用过顶前馈2种过顶情况进行测试对比,测试结果如图 12所示。可以看出,没有采用过顶前馈时,方位误差最大为180°,采用过顶前馈后,误差降为原来的一半(即90°),表明采用过顶前馈的效果明显。在以上测试中,仅仅是飞机飞行位置和速度采用飞行仿真系统来模拟,测试对象定向天线则是采用实物来进行测试,因此定向天线的测试结果与实际工作情况是完全一致的。目前,该系统已在多个项目中得到了应用,应用结果表明,系统跟踪平稳、可靠。定向天线自跟踪系统实物图如图 13所示。

|
| 图 12 过顶前馈效果 Fig. 12 Zenith pass feedforward effect |

|
| 图 13 定向天线自跟踪系统实物图 Fig. 13 Real directional antenna automatic tracking system |
本文设计并实现了一种具有机动跟踪能力的无人机定向天线自跟踪系统,提高了系统的机动性和隐蔽性。
1) 通过实时采集载车方位、俯仰和位置等信息,利用基于相对位置的目标角计算方法,可实现定向天线在机动过程中的自动跟踪能力。
2) 提出一种基于相对位置计算目标角的新方法,与现有方法相比,不用象限判断,不会造成歧义,易于工程实现,应用结果表明其是有效的。
3) 利用速度对位置进行预测平滑,平滑了定向天线跟踪动作,降低了运动部件的磨损,提高了系统跟踪精度,当位置信息丢失、速度变化不大时,还可保持定向天线的正确指向,避免目标丢失。
4) 利用方位运动前馈控制策略,有效降低了过顶跟踪误差,提高了系统可靠性和适应性。
| [1] | DING X L, YU Y S.Motion planning and stabilization control of a multipropeller multifunction aerial robot[J].IEEE/ASME Transactions on Mechatronics,2013,18(2):645-656. |
| Click to display the text | |
| [2] | DEHGHAN S M M, MORADI H.A new approach for simultaneous localization of UAV and RF sources (SLUS)[C]//2014 International Conference on Unmanned Aircraft Systems (ICUAS).Piscataway,NJ:IEEE Press,2014:744-749. |
| Click to display the text | |
| [3] | PENG C,BAI Y, GONG X,et al.Modeling and robust backstepping sliding mode control with adaptive RBFNN for a novel coaxial eight-rotor UAV[J].IEEE/CAA Journal of Automatica Sinica,2015,2(1):56-64. |
| Click to display the text | |
| [4] | ALSHBATAT A I, LIANG D.Adaptive MAC protocol for UAV communication networks using directional antennas[C]//2010 International Conference on Networking,Sensing and Control (ICNSC).Piscataway,NJ:IEEE Press,2010:598-603. |
| Click to display the text | |
| [5] | 樊琼剑,高翔, 丁吉,等.一种无人机定向天线稳定跟踪系统[J].四川兵工学报,2013,34(4):84-85. FAN Q J,GAO X,DING J,et al.Research of stable tracking system for the directional antenna of UAV[J].Journal of Sichuan Ordnance,2013,34(4):84-85(in Chinese). |
| Cited By in Cnki (122) | |
| [6] | 王兴国,周丽杰. 新型微波天线快速对准仪的研制[J].机械设计与制造,2013(7):156-158. WANG X G,ZHOU L J.Development of a new type of microwave antenna rapid alignment instrument[J].Machinery Design & Manufacture,2013(7):156-158(in Chinese). |
| Cited By in Cnki (74) | |
| [7] | 杜利明,柴海莉. 基于GPS信息的天线自跟踪设计[J].微计算机信息,2008,24(25):243-244. DU L M,CHAI H L.The design of antenna track on GPS[J].Microcomputer Information,2008,24(25):243-244(in Chinese). |
| Cited By in Cnki (101) | |
| [8] | 杨明堃,高国平, 张廷龙,等.一种探空仪自动跟踪系统的设计[J].通信技术,2012,45(7):1-3. YANG M K,GAO G P,ZHANG T L,et al.Design of automatic tracking system for sonde application[J].Communications Technology,2012,45(7):1-3(in Chinese). |
| Cited By in Cnki (51) | |
| [9] | 冯磊,刘强,韩小军. 动中通步进跟踪系统的设计与仿真[J].无线电工程,2014,44(3):73-76. FENG L,LIU Q,HAN X J.Design and simulation of step tracking system for satcom-on-the-move[J].Radio Engineering,2014,44(3):73-76(in Chinese). |
| Cited By in Cnki (68) | |
| [10] | 张尊泉,李晓柏. 动态点对点通信天线的自动控制研究[J].现代防御技术,2013,41(4):94-99. ZHANG Z Q,LI X B.Research on antenna automatic control of dynamic point-to-point communication[J].Modern Defense Technology,2013,41(4):94-99(in Chinese). |
| Cited By in Cnki (43) | |
| [11] | OGUNDELE D A, ADEDIRAN Y A,AIYEOLA S Y,et al.Model validation and analysis of antenna look angles of geostationary satellite[C]//2012 IEEE International Conference on Computer Science and Automation Engineering (CSAE).Piscataway,NJ:IEEE Press,2012:509-513. |
| Click to display the text | |
| [12] | TITTERTON D H, WESTON J L.Strapdown inertial navigation technology[M].2nd ed.London:Institution of Electrical Engineers,2004:48-50. |
| [13] | 赵琦,张晓林. 基于Windows平台的无人机导航地面测试软件的设计[J].北京航空航天大学学报,2003,29(1):17-19. ZHAO Q,ZHANG X L.Design of test software in base station for navigation under windows environment[J].Journal of Beijing University of Aeronautics and Astronautics,2003,29(1):17-19(in Chinese). |
| Cited By in Cnki (251) | |
| [14] | 王小斌,闫建国, 凌琼.基于GPS仿真器的无人机导航系统半物理仿真研究[J].计算机测量与控制,2008,16(3):401-403. WANG X B,YAN J G,LING Q.Research on UAV navigation system hardware-in-the-loop simulation based on GPS emulator[J].Computer Measurement & Control,2008,16(3):401-403(in Chinese). |
| Cited By in Cnki (253) | |
| [15] | ANG K H, CHONG G,LI Y.PID control system analysis, design, and technology[J].IEEE Transations on Control Systems Technology,2005,13(4):559-576. |
| Click to display the text | |
| [16] | GOHIYA C S, SADISTAP S S,AKBAR S A,et al.Design and development of digital PID controller for DC motor drive system using embedded platform for mobile robot[C]//3rd IEEE International Advance Computing Conference (IACC).Piscataway,NJ:IEEE Press,2013:52-55. |
| Click to display the text | |
| [17] | KRISHNAN P H, ARJUN M.Control of BLDC motor based on adaptive fuzzy logic PID controller[C]//International Conference on Green Computing Communication and Electrical Engineering (ICGCCEE).Piscataway,NJ:IEEE Press,2014:1-5. |
| Click to display the text | |
| [18] | 中华人民共和国交通运输部. 公路工程技术标准:JTG B01—2014[S].北京:人民交通出版社,2015:15. Ministry of Transport of the People's Republic of China.Technical standard of highway engineering:JTG B01—2014[S].Beijing:China Communications Press,2015:15(in Chinese). |
| [19] | TEXAS INSTRUMENTS. TMS320F2808 digital signal processors data manual[EB/OL].[2014-01-17].http://www.ti.com/lit/ds/symlink/tms320f2808.pdf. |
| Click to display the text | |
| [20] | NXP SEMICONDUCTORS. 74ALVC164245 16-bit dual supply translating transceiver[EB/OL].[2014-01-18].http://www.nxp.com/documents/data_sheet/74ALVC164245.pdf. |
| Click to display the text |