



2. 中国人民解放军总医院 泌尿外科, 北京 100039
2. Department of Urology, The General Hospital of Chinese People's Liberation Army, Beijing 100039, China
由于前列腺癌放射性粒子植入具有靶向性强、无副作用、创伤小和疗效确切的特点,在美国已成为治疗早期前列腺癌的标准手段。传统短距离放射治疗(brachytherapy treatment)是在超声的引导下,借助于固定在超声支架上的导向板,临床医生使用手动粒子植入器将20~120颗镍钛合金包裹的125I(144Gy)/103Pd(120Gy)粒子植入靶区部位,连续低剂量放射γ射线对肿瘤细胞进行杀死[1, 2]。一般医生疲劳和抖动会造成粒子位置放置误差,另外,手术环境高辐射和高感染性问题,都严重制约了前列腺手术治疗效果和前列腺治疗手术技术的发展。将机器人技术和放射性治疗技术相结合会克服上述放射性治疗术的缺点,放射性粒子植入机器人系统正是上述技术结合的典范。
前列腺癌粒子植入机器人的研究始于21世纪初期,文献[3, 4, 5]采用的都是直角坐标式结构,借助导向模板较易完成粒子定向放置。由X、Y和Z移动关节简单叠加,组成直角坐标悬臂式结构会降低整体刚度,其自身占用空间较大,运动响应能力也欠佳。文献[6, 7]采用并联式结构,这种设计的优势可以调整穿刺针姿态进入目标靶点,而且不需要用导向模板辅助。
本文沿用并联机器人思想,以设计的3-PCR并联式前列腺癌粒子植入机构为例,研究其运动学方程和工作空间,以实现机器人控制和满足临床手术对工作空间的要求。
1 粒子植入器机构分析 1.1 机器人构型针对测量的人体前列腺会阴部位粒子植入手术的操作空间尺寸如图 1所示,会阴处左右操作尺寸为60 mm,如图 1(a)所示,图中:e=100~120 mm。进针深度为350 mm、高度为60 mm,如图 1(b)所示,图中:a=450~600 mm;b=420~500 mm。机器人布置患者双腿间,植入过程中病人处于仰卧状态,整个操作空间为长方体状。一般前列腺癌粒子植入手术,需要植入30~120颗直径0.8 mm粒子重复性操作。对手术过程的量化分析,穿刺针的定位需要3个平动自由度,末端粒子的放置需要一个移动自由度。考虑穿刺针在前列腺肿瘤靶点定位的安全性问题,设计初定位机构,将穿刺针把沿刺针轴线调整到目标高度(初定位),接近会阴正前方5 cm处,末端粒子植入装置添加一个独立冗余的移动关节,独立的移动关节再将穿刺针平稳运行到靶点。

|
| 图 1 机器人近距离放射性治疗植入工作空间 Fig. 1 Workspace for robotic insertion of brachytherapy |
若初定位机构采用直角坐标式,整体结构偏大,不适应在狭小的会阴处操作,也不太适合30~120次快速重复性操作。整体构成悬臂会导致末端刚度降低,也会影响末端的植入精度。本文选用一种PCR(P为移动副,C圆柱副,R圆柱副)支链组成的具有空间三维平动的组合形式,如图 2所示。选用(a)和(c)方案,前者是欠驱动输入,后者是冗余输入,这2种方式都会使机构控制变得复杂。特别是冗余运动链会使机构产生奇异点而失去控制。本文选用(b)方案,机构自由度数等于驱动数,机构具有确定的运动形式,整体结构也比较对称。

|
| 图 2 不同PCR支链结构简图 Fig. 2 Structure diagram of different types of PCR branched chain |
末端粒子植入装置设计成独立的二自由度移动结构如图 3所示,其中内、外针采用双丝杆螺母驱动形式,初定位机构可以把末端粒子植入装置的外针放置到靶点的目标高度,然后采用丝杆螺母机构将外针微调至靶点,为了避免放射性粒子对手术环境的核辐射,采用封闭式粒子库接收装置如图 3(b)所示,粒子弹匣可快速插入到粒子库接收装置中,放射性粒子始终处于封闭的机械部件中。

|
| 图 3 粒子植入装置结构示意图 Fig. 3 Structure schematic diagram of seed implantation mechanism |
另外,前列腺两侧有耻骨,对于前列腺肿瘤较大的患者,在穿刺时容易扎到耻骨,从而造成医疗事故。在外针的前支撑端设计了Nano17力矩传感器,这样在穿刺反馈控制中,可以减少对患者持续穿刺伤害。
1.2 自由度的性质和主动副的选取建立各个分支坐标为Bi-XiYiZi,Zi轴沿Pi副轴线方向,Xi轴沿Ci副轴线方向,Yi轴由右手准则确定如图 4所示,i=1,2,3。根据约束旋量理论[8],得到第i支链的运动旋量为

|
| 图 4 3-PCR旋量系 Fig. 4 Screw system of 3-PCR |
式中:yij、zij为$ij轴线在Bi-XiYiZi下的坐标,则各支链在该坐标系下的约束旋量系为

由图 4(a)约束旋量系可知,这2个约束旋量是沿Y、Z轴方向的2个约束力偶$i1r和$i2r,限制了动平台绕Y、Z轴的2个转动自由度。由于各支链结构相同,其他2个支链也都对动平台提供2个约束力偶,则3条支链共施加6个约束力偶。其中3个沿竖直方向,平行于Z轴,是竖直方向的一个公共约束力偶$i1r;另外3个约束力偶$i2r共面,最大线性无关组是2,将约束掉绕平行于该平面所有轴线的转动。因此绕Z轴旋转也被限制。此机构有公共约束且不是瞬时机构,即λ=1;机构中存在虚约束ν=1;没有局部约束ζ=0;机构阶数d=5;构件数n=11;运动副g=12。
将以上参数代入到修正的Kutzbach-Grubler公式[8]中:

式中:M为机构自由度数;fi为第i个运动副相对自由度数。
将基座上3个Pi1副刚化,那么新机构的运动旋量系可以重新表示为
则各支链在该坐标系下的约束旋量系为

由式(5)可以求出约束旋量系和该机构没有刚化前一致,也就是说支链中缺少3个Pi1副也不会改变该机构动平台受到的约束力偶。进一步将参数带入式(3)求解得到M=0,即满足主动副判断准则[9],故采用基座上的3个Pi1副作为主动副是合理的。整体的方案如图 5所示,基座安装在手术台上,且置于导向模板的正前方,基座上安装3个驱动气缸作为驱动,这种布局将连杆处关节驱动电机的质量转移到基座上,降低了等效动平台的质量,提高了机器人末端的有效负载比。另外,动平台的下方安装二自由度粒子植入装置,机器人复位时,可以保证穿刺针始终处于初定位机构的内部,易于防护。

|
| 图 5 粒子植入机器人整体结构示意图 Fig. 5 Whole structure diagram of seed implantation robot |
初定位机构上的运动副相对初始位置如图 6所示,基坐标系为O-XYZ,X轴沿C1副轴线方向,Z轴沿P11副轴线,Y轴由右手定则确定。动坐标系p-xyz,支链参考坐标系为Bi-XiYiZi,各轴方向如图 4所述。RB和RM分别为基座和动平台外接圆半径,li为Pi1副的输入,di为Pi1副参考点Ai偏移尺寸,L为连杆AiPi长度,θi为连杆AiPi与水平面夹角。

|
| 图 6 3-PCR机构简图 Fig. 6 Diagram of 3-PCR mechanism |
支链参考坐标系到基坐标系的方向余弦矩阵为OBiT,则有
式中:αi=0°,120°,240°。
动平台上点pi在支链参考坐标系下的坐标为Bip,根据初始几何关系有

在基坐标系下的坐标为Op,那么转化矩阵为

将式(6)和Bip代入式(7)中,求得该机构第i支链的约束位置方程为
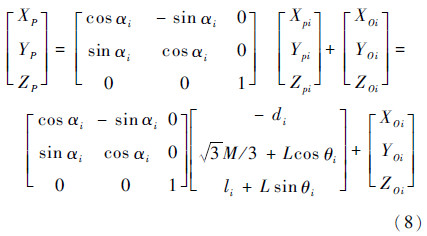
式中:[XBi YBi ZBi]T为Bi点在基坐标系下的坐标,代入式(6)为
结合式(8)化简求得li的解析式为

式中: 。
。
由式(9)可知,若给定动坐标系p-xyz相对于基坐标系O-XYZ的位姿状态Op=[Xp Yp Zp]T时,每一组li(i=1~3)有8组解,按图 6中,在确定的li范围类有确定的解。
2.2正运动学方程代入αi到式(9)可得关于Xp、Yp和Xp三元二次方程组为
采用Bezout消元法[10, 11]求解该机构三元二次方程组的解析解,进一步简化式(10)得
式中:a1=1;a2=a3=3/4;b1=2H;b2=RB+RM+ Yp/2;b3=(H-Yp/2);c1=H2+(Zp-l1)2-L2;c2=(H-Yp)2+(Zp-l2)2-L2;c3=(H-Yp)2+(Zp-l3)2-L2。
Yp/2;b3=(H-Yp/2);c1=H2+(Zp-l1)2-L2;c2=(H-Yp)2+(Zp-l2)2-L2;c3=(H-Yp)2+(Zp-l3)2-L2。
分别将式(12)×a2-式(13)×a3和式(13)×c2-式(12)×c3这2个方程,用矩阵形式表示为

式(14)表示关于Xp和1的2个线性方程,其系数矩阵行列式为零,则有

为了消除Yp,将式(15)重新定义为

式中:各系数λi为关于Zp的二次多项式。
式(16)×λ1Yp2-式(11)×a1,可以得到

式(16)×(λ1Yp3+λ2Yp2)-式(11)×(a1Yp+b1),可以得到

然后,式(11)×Yp,则有

式(11)、式(17)~式(19)可被认为是关于变量Yp3、Yp2、Y1以及1的4个齐次线性方程构成特征方程,其系数行列式为零,那么
通过3.1节式(21)可以得到关于Zp的8次多项式,这也意味着Zp最多有8个解。当给定Zp时,Yp和Xp可以通过式(12)和式(13)求解得到,同时Xp、Yp和Zp解的总数为32组解。尽管有如此多组解,但是考虑机构几何约束条件,仅能找到最合适的一组解。
3 仿真分析 3.1 数值验证3-PCR并联机构实际几何结构参数如下:RB=259.8 mm,RM=147.7 mm,L=100 mm。通过输入4组合适Pi1副的参数[l1 l2 l3]如表 1所示,将这些参数分别代入式(21)可以得到关于Zp的8次多项式为[12]
| 组 | 类型 | l1/mm | l2/mm | l3/mm | x/mm | y/m | z/mm |
| 1 | 正解 | 225.00 | 225.00 | 225.00 | 0.002 | 0.001 | 301.654 |
| 反解 | 225.07 | 225.03 | 225.02 | ||||
| 2 | 正解 | 230.00 | 210.00 | 300.00 | 40.00 | 0.002 | 305.02 |
| 反解 | 229.89 | 209.95 | 299.96 | ||||
| 3 | 正解 | 215.00 | 255.00 | 220.00 | -17.40 | -17.70 | 302.02 |
| 反解 | 214.97 | 254.99 | 220.004 | ||||
| 4 | 正解 | 190.00 | 210.00 | 240.00 | 11.87 | -27.54 | 284.118 |
| 反解 | 190.04 | 210.03 | 239.98 |

式中:ki为常数项系数。
每组[l1 l2 l3]输入下,Zp理论上有8个解,根据结构约束条件取最合适的解,然后分别代入式(11)和式(12)可以得到4组[x y z]T。为了进一步验证逆运动学方程的正确性,将所获得4组[x y z]T代入式(10)中,计算得到动平台p点的位姿状态[Xp Yp Zp]T。对比[x y z]T和[Xp Yp Zp]T数值计算如表 1所示,其结果具有很好的一致性,故所建立的方程可以很好地表示机构运动状态。
3.2 运动学仿真在速度反解求解过程中,各式中vi(i=l,2,3)表示Pi1副中驱动杆的移动速度,vpx、vpy和vpz为动坐标系原点p在基坐标系O-XYZ各轴速度分量。将式(9)两边同时对时间求导可得
使p点的位姿状态Op=[Xp,Yp,Zp]T的运动轨迹为空间螺旋曲线,其运动方程Xp=30 cos(2t),Yp=30 sin(2t),Zp=100+2t,采用时间为10 s,仿真步骤为100步。将这些参数化方程代入式(10)、式(22)进行求解,可以得到Pi1副li和Pi1副的移动速度vi关于时间的函数式,通过MATLAB运动学仿真得到驱动副Pi1位移和速度变化规律如图 7所示。

|
|
图 7 p点为空间螺旋曲线时驱动副Pi1运动规律
Fig. 7 Law of motion of active joints P |
由图 7知该机构驱动副Pi1位移和速度变化曲线光滑,说明机构没有受到惯性冲击,也具有较好运动稳定性,便于实时控制。
3.3 工作空间仿真建立目标搜索空间为圆柱体,结合机构几何约束条件,给出圆柱坐标系:
基于位置反解求解3-PCR并联机构的工作空间,还需要考虑机构的几何约束条件[13]。由式(10)定义取“+”时,驱动杆Pi1副输入取最大极值lmax=312 mm,取“-”时为最小极值lmin=100 mm这2种情况。其Pi1副约束范围为lmin≤li≤lmax。由式(8)得到圆柱副转角约束方程为θi=±arcsin((Zp-li)/L),当连杆AiPi到最高点时,取“+”时的最大值θmax=60°,到最低点时取“-”的最小值θmin=-60°,上下极限位置范围θmin≤θi≤θmax。
偏移di的约束方程为
连杆AiPi移动范围有左右2种极限位置,取“+”时,即运动到最右边时dmax=30 mm;取“-”时,即运动到最左边时dmin=-30 mm。左右极限位置范围dmin≤di≤dmax。
给定机构几何参数RB=259.8 mm,RM=147.7 mm,L=100 mm,100 mm≤li≤312 mm,-60°≤θi≤60°,-30 mm≤di≤30 mm。利用运动学反解式(10)和几何约束条件,采用极限边界搜索法[14]在目标工作空间式(23)下,求解得到了动平台在固定姿态α=β=γ=0°时的工作空间如图 8所示。

|
| 图 8 3-PCR并联机构的工作空间 Fig. 8 Workspace of 3-PCR parallel-chain mechanism |
由图 8(a)可知,该机构工作空间上部分近似三棱锥,这部分受驱动杆Pi1最大杆长限制产生的上边界,下部为近似倒置圆锥,这部分驱动杆Pi1最小杆长限制产生的下边界,中间部分六棱柱形状。图(b)是x=0,x=30时YOZ工作空间截面,其中x=0下截面面积为15 674 mm2。临床中的导向模板的面积为60 mm×60 mm,另外前列腺上缘至耻骨联合上缘皮肤表面距离为57 mm,前列腺下缘至会阴部皮肤表面距离为30.1 mm,前列腺上下径为24.3 mm[15]。所以临床采用该并联机构对前列腺进行粒子放置完全能满足操作空间要求。
4 结论基于测量的人体前列腺会阴部操作空间和手术过程量化分析,研究一种适合前列腺癌粒子植入机器人3-PCR并联式构型,并对其进行了运动学建模和仿真,得到:
1)通过旋量理论分析了该机构具有三维平动,以及确定了Pi1副作为主动输入。采用封闭矢量法和Bezout消元法建立了该机构正、逆运动学方程,采用4组数值计算验证了所建立运动学方程的正确性。
2)利用MATLAB对p点为空间旋量时驱动副Pi1运动规律进行仿真分析,仿真结果显示该机构运动平稳。
3)利用极限边界搜索法求解得到该机构在固定姿态下工作空间,其结果能完全满足临床前列腺粒子植入手术工作范围的要求。
| [1] | 王俊杰,黄毅,冉维强,等. 125I粒子近距离前列腺癌临床应用[J].中华放射医学与防护,2012,24(2):509-512. WANG J J,HUANG Y,RAN W Q,et al.Clinical application of transperineal 125I-seed implantation guided by ultrasonography in prostate cancer[J].Chinese Journal of Radiological Medicine and Protection,2012,24(2):509-512(in Chinese). |
| Cited By in Cnki (41) | |
| [2] | ZHANG Y D, PODDER T K,NG W S.Semi-automated needling and seed delivery device for prostate brachytherapy[C]//2006 IEEE/RSJ International Conference on Intelligent Robots and Systems.Piscataway,NJ:IEEE Press,2006:1279-1284. |
| Click to display the text | |
| [3] | YU Y,PODDER T, ZHANG Y D,et al.Robot-assisted prostate brachytherapy[J].Computer Aided Surgery,2007,12(6):366-370. |
| Click to display the text | |
| [4] | PODDER T K, NG W S,YU Y.Multi-channel robotic system for prostate brachytherapy[C]//2007 Annual International Conference of the IEEE Engineering in Medicine and Biology Society.Piscataway,NJ:IEEE Press,2007:1233-1236. |
| Click to display the text | |
| [5] | VAIDA C, PLITEA N,GHERMAN A,et al.Structural analysis and synthesis of parallel robots for brachytherapy[J].New Trends in Medical and Service Robots,2014,16:191-204. |
| Click to display the text | |
| [6] | JIANG S,GUO J, LIU S,et al.Kinematic analysis of a 5-DOF hybrid-driven MR compatible robot for minimally invasive prostatic interventions[J].Robotica,2012,30(7):1147-1156. |
| Click to display the text | |
| [7] | 黄真,赵永生, 赵铁石.高等空间机构学[M].北京:高等教育出版社,2006:116-118. HUANG Z,ZHAO Y S,ZHAO T S.Higher spatial mechanism[M].Beijing:Higher Education Press,2006:116-118(in Chinese). |
| [8] | 杨廷力. 机器人机构拓扑结构学[M].北京:机械工业出版社,2003:47-48. YANG T L.Topology structure design of robot mechanisms[M].Beijing:China Machine Press,2003:47-48(in Chinese). |
| [9] | LUKANIN V. Inverse kinematics,forward kinematics and working space determination of 3DOF parallel manipulator with S-P-R joint structure[J].Periodica Polytechnica,2005,49(1): 39-61. |
| Click to display the text | |
| [10] | 黄昔光,廖启征, 魏世民,等.一般6-6型平台并联机构位置正解代数消元法[J].机械工程学报,2009,45(1):56-61. HUANG X G,LIAO Q Z,WEI S M,et al.Forward kinematics analysis of the general 6-6 platform parallel mechanism based on algebraic elimination[J].Chinese Journal of Mechanical Engineering, 2009,45(1):56-61(in Chinese). |
| Cited By in Cnki (16) | Click to display the text | |
| [11] | YANG M L, QING S X.Design,analysis and applications of a class of new 3-DOF translational parallel manipulators[M].Vienna: I-Tech Education and Publishing,2005:464-467. |
| [12] | 黄田,汪劲松. Stewart并联机器人位置空间解析[J].中国科学(E辑),1998,28(2):136-145. HUANG T,WANG J S.Analysis location spatially of Stewart parallel manipulator[J].Science in China (Series E),1998,28(2): 136-145(in Chinese). |
| Cited By in Cnki (139) | |
| [13] | 李浩,张玉茹, 王党校.6-RSS并联机构工作空间优化算法对比分析[J].机械工程学报,2010,46(13):61-67. LI H,ZHANG Y R,WANG D X.Comparative analysis of optimization algorithms in workspace optimization of parallel mechanisms[J].Chinese Journal of Mechanical Engineering,2010,46(13):61-67(in Chinese). |
| Cited By in Cnki (12) | Click to display the text | |
| [14] | 杨亚汝,姜露莹, 许小云,等.实时三维超声测量模拟前列腺体积的实验研究[J].临床超声医学,2008,10(1):5-6. YANG Y R,JIANG L Y,XU X Y,et al.Experiment study on imitative measurement of prostate volume with real-time three-dimensional ultrasound[J].Journal of Ultrasound in Clinical Medicine,2008,10(1):5-6(in Chinese). |
| Cited By in Cnki (7) |