



运动目标监视是空间对地遥感观测的重要应用方向之一,星载合成孔径雷达(Synthetic Aperture Radar,SAR)不受天气、气候的影响,能全天时的执行对地观测任务,在运动目标监视方面发挥了重要的作用。
目前,在轨/在研星载SAR系统具有地面运动目标指示(Ground Moving Target Indication,GMTI)的能力,按实现方式可分为单星单通道、单星多通道和分布式卫星系统[1-2]。传统GMTI处理方法根据不同系统的特点可分为3类:第1类是根据运动目标的回波信号特性直接进行检测,常用于单通道星载SAR系统中,如基于运动目标的多普勒中心频率的频域滤波法[3]、基于运动目标多普勒调频率的反射特性位移法[4]、维纳-维勒分布法[5]、截断平均方法[6]和基于速度相关函数的检测方法[7]等,单通道运动目标检测方法实现简单、计算量小,设备复杂度最低,但检测性能差且无法检测低速目标。第2类是基于多通道系统的运动目标检测技术,主要有相位中心偏置天线(Displacement Phase Center Antenna,DPCA)技术[8]、沿迹干涉(Along Track Interferometry,ATI)处理[9]和空时自适应处理(Space Time Adaptive Processing,STAP)[10]等,STAP方法是理论上的最优处理方法,但需要杂波的先验知识,设备复杂,运算量非常大,难以应用于实际系统;DPCA和ATI方法设备复杂度和计算复杂度适中,检测性能较高,是较为实用的检测方法,但它们的非模糊速度较小,需要对运动目标速度进行解模糊处理。第3类是根据序贯图像检测,最具代表性的是2012年德国宇航中心提出了Bi-1Direction模式[11],该模式具有实现方便、工作灵活和测速精度高等特点,经TerraSAR-X实际获取数据的验证,其测速精度可达0.1m/s[12]。但Bi-1Direction模式的缺陷在于脉冲重复频率需要提高一倍,限制了测绘带宽,且无法实现对同一区域的多次观测形成轨迹,难以满足运动目标监视的需求。
针对上述方法的局限性,本文提出了一种基于Hybrid-TOPS的星载SAR运动目标监视新模式。首先,本文利用混合度因子对星载SAR成像模式进行定量化的描述和区分。进而,结合定量化分析结果将Terrain Observation by Progressive Scan(TOPS)模式和逆TOPS模式相结合,提出一种星载SAR运动目标监视新模式Hybrid-TOPS,该模式具备对同一区域多次观测的能力,同时能实现方位向连续观测,十分有利于运动目标的监视。然后,对新模式下获取的序贯图像进行配准,根据配准过程中图像间的偏移量判断是否存在运动目标以及完成目标速度信息的反演。最后,通过计算机仿真试验分析该模式的有效性和精确性。
1 星载SAR成像模式定量化描述 1.1 星载SAR成像模式统一几何模型图 1给出了星载SAR各种成像模式下的工作示意图[13],图中v为卫星飞行速度。

如图 1所示,为将星载SAR各种成像模式统一,如条带(Stripmap)模式、扫描(Scan)模式、聚束(Spotlight)模式、滑动聚束(Sliding spotlight)模式、TOPS模式和逆TOPS(Inverse TOPS)模式,引入了空间等效旋转点,在成像过程中,波束中心始终指向空间等效旋转点。对于条带模式和扫描模式,等效旋转点位于无穷远处;对于聚束模式,等效旋转点位于地面场景中心;对于滑动聚束模式,等效旋转点位于地面以下;对于TOPS模式,等效旋转点位于卫星以上;对于逆TOPS模式,等效旋转点位于卫星和场景之间。因而,对于星载SAR各种成像模式而言,对地观测过程中波束中心始终指向等效旋转点,等效旋转点空间位置的差异就区分了星载SAR采用的成像模式。
1.2 星载SAR回波信号特性统一描述为进一步定量化描述星载SAR各种成像模式回波信号的特性,首先对等效旋转点空间位置进行定量化描述,因而引入了混合度因子γ[14]:
|
(1) |
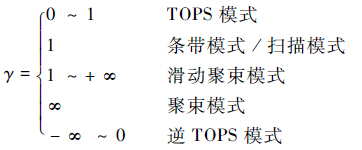
式中:Rrs为等效旋转点到卫星的最短距离;Rrg为等效旋转点到场景中心的最短距离。如图 1所示,利用γ取值范围即可区分不同的成像模式,具体为
|
(2) |
其中:混合度因子γ为正时,等效旋转点位于卫星之上或地面场景之下;混合度因子γ为负时,等效旋转点位于卫星之下和地面场景之上。
利用混合度因子进一步可得到目标方位向分辨率ρa及方位向测绘带宽Sa:
|
(3) |
|
(4) |
式中:L为天线长度;T为一次对地观测时间;Vg为卫星地面速度投影。
需要说明的是,混合度因子是斜距的函数[13],因此方位向分辨率和测绘带宽也随斜距略有变化,但这种随斜距的空变性很小,并不影响后续分析,因此本文忽略这一变化。
2 Hybrid-TOPS模式设计与实现为实现对运动目标的监视与运动参数估计,需要在秒量级内完成对同一目标区域的多次观测,形成序贯图像,从而完成运动目标的检测与速度信息的提取。文献[12]是通过采用相控阵天线技术,沿方位向形成2个波束,卫星在飞行过程中,2个波束在几秒钟时间内先后照射目标区域,得到2幅SAR图像,通过对比2幅SAR图像完成运动目标检测与运动信息的提取。该模式较传统模式而言,其测速精度高,易于实现,但其缺陷在于,该模式得到的同一区域SAR图像样本数较少,且由于采用双波束后,脉冲重复频率相应要提高一倍,因此测绘带宽减少一倍,不利于广域目标的监视。
本文提出的基于Hybrid-TOPS星载SAR数字化订制模式的思想,根据应用需求,通过顶层优化设计,设置混合度因子,确定成像模式,可实现同一区域的多次观测,且具备方位向连续测绘能[LL]力,因此更加有利于运动目标的检测。
图 2以3次观测为例,给出了对同一观测区域3次连续观测的示意图。

|
| 图 2 Hybrid-TOPS新模式实现方式示意图 Fig. 2 Schematic diagram of implementation of proposed Hybrid-TOPS mode |
图 2给出了一个Hybrid-TOPS模式较为简单的实现,对其实现方式进行具体分析和描述。首先,卫星工作在Mode1模式(TOPS模式)下,此时选择混合度因子为0.5,则AB区域完成了一次观测;卫星接着工作在Mode2模式(TOPS模式)下,混合度因子选择为0.25,此时AB区域被再一次观测,BC区域完成首次观测;卫星接着工作在Mode3模式(逆TOPS模式)下,混合度因子为-0.5,此时,BC区域第2次被观测;卫星接着工作在Mode4模式(TOPS模式)下,混合度因子选择为0.25,此时,BC区域第3次被观测,CD区域被第1次观测;卫星接着工作在Mode1模式(TOPS模式)下,混合度因子选择为0.5,此时,CD区域被第2次观测;卫星接着工作在Mode2模式(TOPS模式)下,混合度因子选择为0.25,此时,CD区域被第3次观测,DE区域被第1次观测;卫星接着工作在Mode3模式(逆TOPS模式)下,混合度因子选择为-0.5,此时,CD区域被第3次观测,DE区域被第2次观测;卫星接着工作在Mode4模式(TOPS模式)下,混合度因子选择为0.25,此时,DE区域第3次被观测,EF区域被第1次观测;卫星接着工作在Mode1模式(TOPS模式)下,混合度因子选择为0.5,此时,EF区域被第2次观测;依次重复操作,则可实现方位向连续测绘。通过分析不难发现,从B点开始,每一个区域被观测了3次,且观测条件均相同。实际工程实现中可根据测绘带宽度和目标所在位置设置不同的混合度因子组合。
如果天线方位向波束能力进一步提升,可进一步增加对目标区域的观测次数。
3 运动目标信息提取 3.1 成像处理本文所提出的星载SAR数字化订制模式需要多种星载SAR成像模式的配合,而现有SAR处理器多针对特定的成像模式而开发,文献[14]提出了一种针对多种SAR成像模式的统一处理流程,本方法拟采用上述思路,开展星载SAR成像处理算法的研究。
统一处理成像算法流程如图 3所示。

|
| FFT—傅里叶变换;IFFT—傅里叶逆变换。 图 3 统一处理成像算法流程图 Fig. 3 Flowchart of unified imaging algorithm |
通过Hybrid-TOPS模式可实现对同一区域多次观测,得到序贯图像,对所得序贯图像配准是进行运动目标信息提取的前提。目标运动主要导致运动目标在方位向或距离向的平移,在海洋中运动舰船的散射强度强于海洋,表现在SAR图像中运动舰船亮度明显不同于海洋背景。基于此本文采用一种基于互信息的图像配准算法,即依据图像的灰度统计信息,以互信息的相似性作为判别准则,搜索序贯图像间互信息量达到最大时的图像偏移量来达到配准的目的。本文中可以采取先截取运动目标图像再配准的方法,提高配准效率。
3.3 运动目标速度提取斜视情况下雷达与目标之间的斜距方程可表示为[15]

|
(5) |
式中:R0为波束中心照射目标时的斜距;V为卫星等效速度;va和vr分别为目标方位向速度和径向速度;φ为天线斜视角。
1) 方位向速度
目标方位向速度导致多普勒中心频率误差:
|
(6) |
式中:λ为雷达波长。
目标方位向速度导致多普勒调频率误差:

|
(7) |
目标方位向速度主要引起运动目标在方位向位移和图像散焦,由多幅不同斜视角度观测所得SAR序贯图像中目标位置的偏差可反演运动目标方位向速度,小斜视角情况下va为
|
(8) |
式中:Δn为不同方位角度观测所得图像中目标方位向偏移像素个数;fprf为脉冲重复频率;t0为2次观测之间卫星飞行时间。
2) 径向速度
目标径向速度导致多普勒中心频率误差:
|
(9) |
目标径向速度导致运动目标方位向位移和径向位移。小斜视角情况下,可认为目标径向速度所引起的多普勒中心频率误差与斜视角无关,则2次成像结果中,运动目标在方位向偏移相同,又因为2次观测之间卫星飞行时间、多普勒中心频率和斜视角度之间的相关性,则目标在径向偏移位置相同,基于单星Hybrid-TOPS方法不能有效检测运动目标径向速度。
4 计算机仿真为验证Hybrid-TOPS新模式的正确性,做如下仿真试验,实现对同一目标区域的3次观测,分别记为观测1、观测2、观测3,其中观测1和观测3为TOPS模式,观测2为逆TOPS模式。在1 024 m×1 024 m海洋区域摆放运动舰船,该舰船方位向速度va=20 m/s。
| 参数 | 数值 |
| 轨道高度/km | 500 |
| 轨道倾角/(°) | 98 |
| 天线视角/(°) | 30 |
| 天线长度/m | 4.8 |
| 信号带宽/MHz | 620 |
| 采样率/MHz | 720 |
| 混合度因子1 | 42373 |
| 混合度因子2 | -0.5 |
| 混合度因子3 | 42373 |
| 方位向点数1 | 16 384 |
| 方位向点数2 | 16 384 |
| 方位向点数3 | 16 384 |
| 距离向点数4 | 96 |
| 脉冲重复频率1/Hz | 826 |
| 脉冲重复频率2/Hz | 1 408 |
| 脉冲重复频率3/Hz | 826 |
仿真参数如表 1所示。 首先,由于多次观测使用不同的混合度因子,其成像分辨率不同,通过尺度变换得到像素分辨率相同的序贯SAR图像;其次,由于不同观测间的雷达视角不同,运动目标形状略有不同,可对运动目标进行几何校正,当斜视角较小时,该形变可忽略;最后,再两两配准得到运动目标方位向位置偏移,最后通过式(8)反演运动目标方位向速度。
Hybrid-TOPS新模式流程如图 4所示。

|
| 图 4 Hybrid-TOPS新模式流程图 Fig. 4 Flowchart of Hybrid-TOPS new mode |
本实验中首先经过尺度变换得到图像分辨率相同的3幅SAR图像,即此时fprf统一为1 408 Hz,成像结果如图 5、图 6所示。

|
| 图 5 Hybrid-TOPS模式成像结果1 Fig. 5 The first image results on Hybrid-TOPS |

|
| 图 6 Hybrid-TOPS模式成像结果2 Fig. 6 The second image results on Hybrid-TOPS |
图 5(a)、图 6(a)均为观测1所得SAR图像,图 5(b)为观测2所得SAR图像,图 6(b)为观测3所得SAR图像。
表 2所示为计算机仿真结果。
| 参数 | 数值 |
| 观测1、观测2之间像素差 | 39 |
| 观测1、观测3之间像素差 | 50 |
| V/(m·s-1) | 7 682 |
| V1,2/(m·s-1) | 19.8 |
| 观测1、观测2观测时间差/s | 5.17 |
| 观测1、观测3观测时间差/s | 6.5 |
| Vg/(m·s-1) | 7 124 |
| V1,3/(m·s-1) | 20.6 |
表 2中V1,2表示由观测1和观测2所得SAR图像经配准后反演得到的运动目标方位向速度,V1,3表示由观测1和观测3所得SAR图像经配准后反演得到的运动目标方位向速度。
由表 2结果知,估计的目标方位向速度平均值Va=20.2 m/s,估计的目标速度和真实速度间的相对误差为ΔVa=0.2 m/s,绝对误差为1%,具有较高的动目标速度检测精度。
5 结 论本文针对星载SAR运动目标监视问题展开:
1) 首先对星载SAR成像模式进行了定量化的描述与区分,进而结合TOPS模式和逆TOPS模式提出了一种适用于运动目标监视的新模式Hybrid-TOPS。
2) 与传统技术和方法相比较,本文提出的新模式工程实现容易、处理流程简单、测速精度高,因此十分适用于运动目标的速度测量。
后续,结合星载SAR成像模式定量化分析结果将进一步开展深入研究,分析研究不同运动条件下的速度测量精度。
| [1] | RANEY R K. Synthetic aperture imaging radar and moving targets[J]. IEEE Transactions on Aerospace and Electronic Systems,1971, 7 (3) : 499 –505. |
| Click to display the text | |
| [2] | SUCHANDT S, RUNGE H, KOTENKOV A. Automatic extraction of traffic flows using TerraSAR-X along-track interferometry[J]. IEEE Transactions on Geoscience and Remote Sensing,2010, 48 (2) : 820 –829. |
| Click to display the text | |
| [3] | FREEMAN A, CURRIE A. Synthetic aperture radar images of moving targets[J]. GEC Journal of Research,1987, 5 (2) : 106 –115. |
| Click to display the text | |
| [4] | MOREIRA J R, KEYDEL W. A new MTI-SAR approach using the reflectivity displacement method[J]. IEEE Transaction on Geoscience and Remote Sensing,1995, 33 (5) : 1238 –1244. |
| Click to display the text | |
| [5] | BARBAROSSA S, FARINA A. Detection and imaging of moving objects with synthetic aperture radar,Part2:Joint time-frequency analysis by wigner-ville[J]. IEE Proceedings F:Radar and Signal Processing,1992, 139 (1) : 89 –97. |
| Click to display the text | |
| [6] | FIENUP J R. Detecting moving targets in SAR imagery by focusing[J]. IEEE Transactions on Aerospace and Electronic Systems,2001, 37 (3) : 794 –809. |
| Click to display the text | |
| [7] | ARⅡ M. Efficient motion compensation of a moving object on SAR imagery based on velocity correlation function[J]. IEEE Transactions on Geoscience and Remote Sensing,2014, 52 (2) : 936 –946. |
| Click to display the text | |
| [8] | CERUTTI-MAORI D, SIKANETA I. A generalization of DPCA preprocess for multichannel SAR/GMTI radars[J]. IEEE Transactions on Geoscience and Remote Sensing,2013, 51 (1) : 560 –572. |
| Click to display the text | |
| [9] | SLETTEN M A. An analysis of gradient-induced distortion in ATI-SAR imagery of surface currents[J]. IEEE Transactions on Geoscience and Remote Sensing,2006, 44 (7) : 1995 –2002. |
| Click to display the text | |
| [10] | ENDER J H G. Space-time processing for multichannel synthetic aperture radar[J]. Electronics & Communication Engineering Journal,1999, 11 (1) : 29 –38. |
| Click to display the text | |
| [11] | MITTERMAYER J,PRATS P,WOLLSTADT S,et al.Approach to velocity and acceleration measurement in the Bi-Directional SAR imaging mode[C]//201232nd IEEE International Geoscience and Remote Sensing Symposium.Piscataway,NJ:IEEE Press,2012:5618-5621. |
| Click to display the text | |
| [12] | MITTERMAYER J, WOLLSTADT S, PRATS P, et al. Bidirectional SAR imaging mode[J]. IEEE Transactions on Geoscience and Remote Sensing,2013, 51 (1) : 601 –614. |
| Click to display the text | |
| [13] | YANG W, CHEN J, ZENG H C, et al. A novel three-step image formation scheme for unified focusing on spaceborne SAR data[J]. Progress in Electromagnetics Research,2013, 137 (1) : 621 –642. |
| Click to display the text | |
| [14] | 杨威, 李春升, 陈杰, 等. 星载SAR滑动聚束模式三步扩展算法[J]. 北京航空航天大学学报,2012, 38 (3) : 297 –302. YANG W, LI C S, CHEN J, et al. Extended three-step focusing algorithm for spacebarne sliding spotlight SAR image formation[J]. Journal of Beijing University of Aeronautics and Astronautics,2012, 38 (3) : 297 –302. (in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |
| [15] | 魏钟铨. 合成孔径雷达卫星[M]. 北京: 科学出版社, 2001 : 139 -142. WEI Z Q.. Synthetic aperture radar satellite[M]. Beijing: Science Press, 2001 : 139 -142. (in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |