



卫星编队飞行技术在合成孔径雷达、空间干涉仪以及在轨组装等方面具有明显优势.考虑到发射成本和能量消耗,目前编队飞行任务大多采用被动形式的编队控制方式,即相对运动过程中较少使用推力器对编队构型进行控制.随着空间任务朝着多样化和复杂化的方向发展,对卫星编队飞行的相对轨道控制能力提出了更高的要求,主动形式的卫星编队控制方式逐渐受到重视.但采用基于冲量原理的火箭发动机进行编队构型控制存在以下几个方面的缺点:①火箭发动机喷射出的羽流会影响临近卫星上的观测器件;②所携带的推进剂,既增加了卫星发射成本,也成为限制卫星在轨寿命的主要因素.
采用星间电磁力[1, 2]、静电力[3]和洛伦兹力[4]等非接触力的无工质推进方式逐渐得到关注.利用航天器之间的电磁力进行相对轨道控制的编队称为电磁航天器编队.由于控制力的产生基于电磁场之间的相互作用,不需要消耗燃料,所以电磁航天器编队飞行能够很好地克服上述问题.
美国麻省理工学院和马里兰大学对电磁航天器编队飞行的可行性、地面试验和在轨验证等进行了长期深入的研究.Miller等[1, 2, 5]首次提出电磁编队飞行的概念,并研究了在TPF计划中采用电磁编队飞行技术的可行性.Hashimoto等[6]提出采用超导线圈进行电磁编队.Elias等[7]针对两颗电磁航天器相对运动提出了一种非线性动力学模型.Ahsun和Miller等[8, 9]提出了n颗电磁航天器编队的非线性自适应控制律.2013年8月3日,美国马里兰大学的RINGS项目中的两颗电磁航天器搭载HTV-4飞船进入国际空间站进行在轨试验,分别对电磁编队飞行技术和星间电能无线传输技术进行验证,这是电磁航天器编队飞行技术第一次在轨飞行试验[10].
近年来国内学者也对电磁航天器编队飞行进行了相关研究[11, 12, 13].张元文等[14]采用反馈线性化及鲁棒H∞方法,研究了空间电磁对接的鲁棒协调控制问题.北京航空航天大学的苏建敏和董云峰[15]基于人工势函数法研究了多颗电磁航天器的编队控制问题;张皓[16]和邵龙飞[17]的研究表明,多颗电磁航天器的编队构型控制问题可以通过序列控制转化为多阶段的两颗电磁航天器相对运动控制.
本文重点研究了两颗电磁航天器的编队构型保持问题,所采用的自适应控制方法可以推广到多颗电磁航天器编队构型控制问题.首先,介绍了电磁航天器编队飞行的基本原理.然后,根据星间电磁控制力计算公式反推控制电流时,考虑两电磁航天器能量消耗的均衡性要求,得到了两星能量消耗均衡的解析解.针对电磁航天器编队构型保持问题,采用基于极坐标的电磁航天器相对运动动力学模型,并考虑工程实际中存在的未知干扰力和电磁模型的参数不确定性,设计了编队构型保持自适应控制律.最后,通过数值仿真验证了控制方法的有效性.
1 电磁航天器编队飞行原理电磁航天器编队飞行是一种新的不消耗燃料的卫星编队形式.编队中各成员卫星称为电磁航天器,其上安装有3个正交的超导线圈.图 1为电磁航天器的概念设计图.当线圈充电时,航天器周围会产生磁场,根据毕奥-萨伐尔定律,可以计算得到航天器周围的磁场分布情况,然后再根据安培定律可以求得磁场中另一航天器所受到的电磁力及电磁力矩.本文研究的电磁航天器编队飞行采用轨道优先的解耦控制策略,即采用星间电磁力控制相对轨道运动,由于电磁力矩所引起的姿态控制问题在这里不做赘述.
 |
| 图 1 电磁航天器概念设计 Fig. 1 Conceptual design of electromagnetic spacecraft |
为描述电磁航天器相对于编队质心的运动,首先定义旋转轨道坐标系O,假设其原点位于编队系统质心,x轴指向轨道矢径方向,y轴指向轨道面法线方向,z方向由右手法则确定.假设两颗电磁航天器组成的编队系统为刚体,定义与刚体固连的本体坐标系为B,坐标系原点位于系统质心,x轴由航天器1指向航天器2.轨道坐标系O绕z轴旋转欧拉角ψ,然后绕新的y轴旋转欧拉角-θ,即可得到本体系B.
在计算星间电磁力过程中,为避免复杂的二次曲面积分运算,目前的研究中大多采用远场近似模型,当星间距离r大于线圈半径R的8倍时,编队中的两颗电磁航天器可以假设为远场中的两个磁偶极子,如图 2所示.
每个磁偶极子的磁矩可以记为μ,其幅值为

根据电磁场计算原理,可以得到两电磁航天器之间电磁力的计算公式[8, 9]:

 |
| 图 2 远场近似模型示意图 Fig. 2 Diagram of far-field approximate model |
式(2)给出了星间电磁力的表达式,已知电磁线圈中电流的大小和相对位置矢量时,可以计算出电磁航天器相互之间的电磁力.实际上,为了对电磁航天器进行控制,需要求解相应的逆问题,即在已知电磁控制力的情况下,计算出各电磁航天器的磁矩,进而求解出相应的控制电流.一种方法是,假设其中一个磁偶极子的磁矩是确定的,然后通过求解一个非线性方程组,得到另一个磁偶极子的磁矩.但这种情况下无法保证编队中各航天器的能量消耗是均衡的,当某一电磁航天器上的能量消耗殆尽时,就意味着整个航天器编队任务的结束,所以电磁航天器编队飞行需要考虑成员航天器能量消耗的均衡性.
对于两颗电磁航天器编队飞行的情况,能量消耗均衡最理想的情况是两个磁偶极子所消耗的能量完全相同,即μ1=μ2.
假设μ1=μ2,对式(2)进行求解,可以得到系统本体坐标系B下磁偶极子磁矩的解析解:
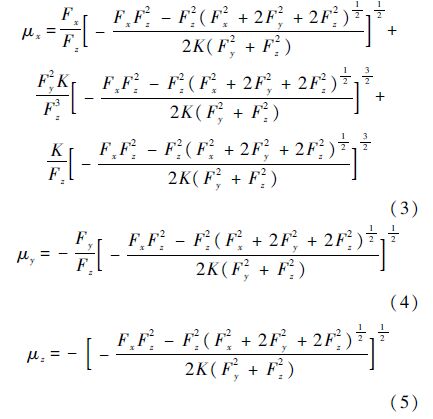
对于两颗电磁航天器的编队飞行,采用式(3)~式(5)对航天器的磁矩进行分配,可以使两航天器消耗的能量完全相同,从而保证编队中成员航天器能量消耗的均衡性,延长航天器编队的运行寿命,这点也是传统推进方式所不具备的优势.
2 电磁编队相对轨道动力学模型本节借鉴绳系卫星系统的动力学方程推导过程,建立两颗电磁航天器编队飞行的非线性相对运动动力学模型.同时,该动力学模型也可以用来描述其他类型的非接触力航天器编队的相对运动.
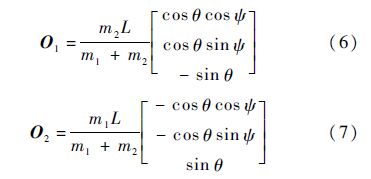
轨道坐标系O中的两电磁航天器的位置矢量可以表示为
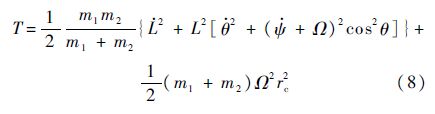
系统的动能可以表示为
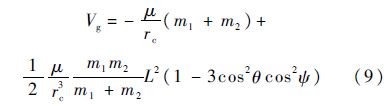
编队系统重力势能的二阶非线性表达式可记为
两电磁航天器编队系统的拉格朗日方程可以写成如下形式[18]:

将式(8)、式(9)代入式(10)中并写成分量形式,假设电磁航天器编队系统质心所在轨道为圆轨道,可以得到关于相对距离L、轨道面内旋转角ψ和滚转角θ的电磁航天器相对运动非线性动力学方程:
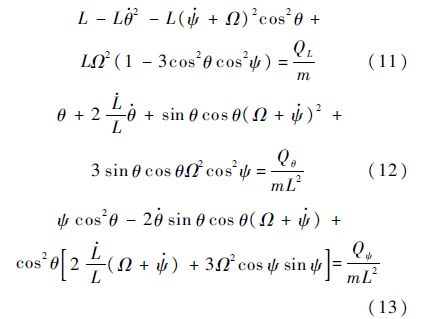
式(11)~式(13)进一步可以记为
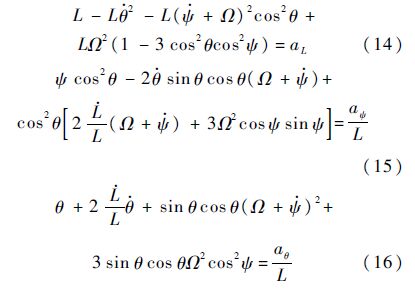
式(14)~式(16)可以简记为
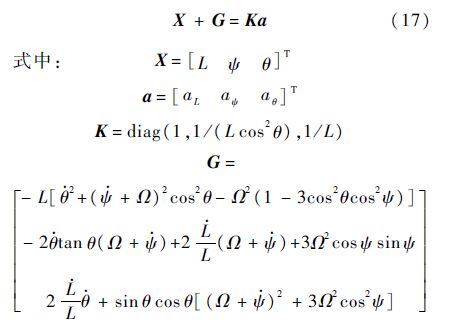
实际上,电磁航天器编队飞行过程中除了受到相互之间的电磁作用力,还会受到未知的相对干扰力,所以式(17)可进一步表示为

另外,如第1节所述,电磁航天器之间电磁力的计算模型是基于远场近似得到的,所以其与真实值存在一定的误差,电磁力的真实值可以通过对远场近似模型的计算值进行修正得到.本文用式(19)表示电磁航天器控制加速度的真实值[8, 9]:
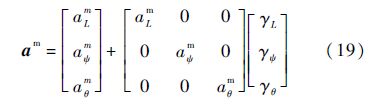
因此,考虑未知干扰力和电磁作用远场近似模型的不确定性,两颗电磁航天器编队飞行的相对运动动力学方程可以记为

本节将在相对运动动力学模型的基础上,针对电磁航天器编队构型保持设计自适应控制律.假设电磁航天器编队构型的期望状态为Xd(t),期望速度为$\dot{X}$d(t),θ为不确定参数的估计值.状态误差可以表示为

速度误差为

不确定参数的估计误差为

复合误差可以记为

对式(24)求导可得

为设计电磁航天器编队构型保持自适应控制律,取李雅普诺夫函数[19]为

对式(26)求导得
为实现编队系统的李雅普诺夫稳定性,取如下控制律:


则式(27)可以化为
假设外界未知干扰力和电磁模型不确定性修正因子都是随时间慢变的,则式(30)可以化为

显然,$\dot{V}$为负半定,根据李雅普诺夫稳定性理论可以判定,该编队系统是稳定的.进一步,根据Barbalat引理可以判定,编队构型渐近收敛到期望值.同时,采用控制律式(28)和自适应律式(29)可以估计出未知干扰力和电磁模型不确定性修正因子.
4 数值仿真本节通过数值仿真算例对电磁航天器构型保持自适应控制律进行验证.
电磁航天器编队构型保持仿真参数如下:编队系统质心所在参考轨道为圆轨道,其半长轴为a=7 000 km;假设编队中两电磁航天器的质量相同,即m1=m2=100 kg;其上的电磁作用机构由3个正交的圆形超导线圈构成,线圈半径R=1 m,线圈匝数n=100.
根据空间任务的需要,希望电磁航天器编队系统能够沿地球矢径方向保持悬停构型,期望构型的具体参数如下:

假设初始时刻电磁航天器编队构型相对于期望构型有一定的误差:

1) 由于编队中两颗电磁航天器之间的距离远远大于超导线圈的半径,采用远场模型即可满足精度要求,可以认为由模型计算得到的电磁力是准确的,所以将电磁作用远场近似模型的不确定性修正因子假设为[γix;γiy;γiz]=[0;0;0].
2) 假设两颗电磁航天器之间的相对干扰加速度为[aLd;aψd;aθd]=[1×10-5sin(Ωt)m/s2;0;0].
自适应控制的相关参数设置如下:
Kp=diag(0.05,0.05,0.05)
Γ=diag(1,1,1,0.1,0.1,0.1)
图 3给出了径向误差δL随时间的变化情况,图 4给出了面内旋转角误差δψ和滚转角误差δθ随时间的变化情况,约1.5个参考轨道周期后,径向误差收敛到1×10-4 m,角度误差都收敛到8×10-6 rad.仿真结果表明,在自适应控制律的作用下,编队构型达到了期望值,说明所设计的编队构型保持控制律是有效的.
 |
| 图 3 误差δL随时间变化曲线 Fig. 3 Histories of error δL changing with time |
 |
| 图 4 误差δψ和δθ随时间变化曲线 Fig. 4 Histories of error δψ and error δθ changing with time |
图 5显示的是电磁航天器编队构型保持过程中L、ψ和θ 3个方向上的控制加速度.从图中可以看出,L方向上的控制加速度的量级在10-5 m/s2,而ψ和θ方向上的控制加速度非常小.
 |
| 图 5 控制加速度随时间变化曲线 Fig. 5 Histories of control accelerations changing with time |
图 6和图 7分别给出了干扰加速度和电磁模型不确定性修正因子的估计值.从图 6中可以看出,L方向上的干扰加速度估计值呈现出正弦变化的趋势,其大小和变化趋势都与所假设的未知干扰加速度非常一致;而另外两个方向上的干扰加速度估计值几乎为零,这也与之前的假设是吻合的.从图 7中可以看出,远场近似模型不确定性修正因子估计值的量级为10-8的,几乎可以忽略不计,这与仿真中所假设的不确定性修正因子是一致的.
 |
| 图 6 干扰加速度随时间变化曲线 Fig. 6 Histories of disturbed accelerations changing with time |
 |
| 图 7 不确定性修正因子随时间变化曲线 Fig. 7 Histories of adjustment factors changing with time |
结合图 5和图 6的仿真结果,可以发现外界干扰加速度对编队构型保持造成了影响,控制加速度随时间变化曲线中所表现出的三角函数变化趋势说明了这点.
仿真结果表明,不确定性参数快速收敛到真实值,说明本文所设计的电磁航天器编队构型保持自适应控制律对未知干扰加速度和电磁作用远场近似模型不确定性修正因子进行了准确估计.
图 8显示的是电磁航天器上3个正交超导线圈中控制电流随时间的变化曲线.从图中可以看出线圈中的控制电流最大值小于100 A,可以采用超导线圈实现.需要指出的是,图中所给出的控制电流结果是采用式(3)~式(5)计算得出的,编队中两电磁航天器上超导线圈中的控制电流的大小是相同的,在编队构型保持过程中其各自所消耗的电能也是完全相同的,这就保证了编队系统中各航天器能量消耗的均衡性,更有利于实现长期的编队构型保持.
 |
| 图 8 线圈中电流随时间变化曲线 Fig. 8 Histories of currents in coils changing with time |
相对于传统的消耗燃料的推进方式,利用星间电磁力进行编队构型保持的电磁航天器编队飞行在未来的空间任务中具有重要的应用价值.本文对电磁航天器编队构型保持控制进行了研究,得到以下结论:
1) 所提出的求解两电磁航天器控制磁矩的解析表达式,是一种新的磁矩分配方式,对研究编队飞行过程中各成员航天器能量消耗的均衡性提供了一条新的解决思路.
2) 针对电磁航天器编队构型保持实际可能面临的未知干扰力和电磁作用远场近似模型的不确定性,可以采用自适应控制方法.通过设计自适应控制律,编队构型能够从初始状态收敛到期望值,表现出良好的控制性能,同时未知干扰力和电磁模型不确定性修正因子的估计值也很快收敛到真实值.
此外,本文研究的电磁航天器编队构型保持自适应控制方法可以为多颗电磁航天器编队的构型保持和重构奠定技术基础.
| [1] | Miller D W,Sedwick R J.Electromagnetic formation flight phase I report[R].Massachusetts:Massachusetts Institute of Technology,2003. |
| [2] | Sedwick R J,Miller D W.Electromagnetic formation flight final report[R].Massachusetts:Massachusetts Institute of Technology,2005. |
| [3] | Inampudi R,Schaub H.Optimal reconfigurations of two-craft coulomb formation in circular orbits[J].Journal of Guidance,Control and Dynamics,2012,35(6):1805-1815. |
| Click browse the original | |
| [4] | Pollock G E,Gangestad J W,Longuski J W.Inclination change in low earth orbit via the geomagnetic Lorentz force[J].Journal of Guidance,Control and Dynamics,2010,33(5):1387-1395. |
| Click browse the original | |
| [5] | Kong E M C,Kwon D W,Schweighar S A,et al.Electromagnetic formation flight for multisatellite arrays[J].Journal of Guidance,Control and Dynamics,2004,41(4):659-666. |
| Click browse the original | |
| [6] | Hashimoto T.Formation flight control using super conducting magnets[D].Massachusetts:Massachusetts Institute of Technology,2002. |
| [7] | Elias L M,Kwon D W,Sedwick R J,et al.Electromagnetic formation flight dynamics including reaction wheel gyroscopic stiffening effects[J].Journal of Guidance,Control and Dynamics,2007,30(2):499-511. |
| Click browse the original | |
| [8] | Ahsun U.Dynamics and control of electromagnetic satellite formations[D].Massachusetts:Massachusetts Institute of Technology,2007. |
| [9] | Ahsun U,Miller D W,Ramirez J L.Control of electromagnetic satellite formations in near-earth orbits[J].Journal of Guidance,Control and Dynamics,2010,33(6):1883-1891. |
| Click browse the original | |
| [10] | Alinger D J.System analysis and design for the resonant inductive near-field generation system(RINGS)[D].Maryland:University of Maryland College Park,2013. |
| [11] | Zeng G Q,Hu M.Finite-time control for electromagnetic satellite formations[J].Acta Astronautica,2012,74(3):120-130. |
| Click browse the original | |
| [12] | 胡敏,曾国强.分离模块集群航天器发展概况[J].装备指挥技术学院学报,2011,22(4):61-66. Hu M,Zeng G Q.Developments of the fractionated spacecraft[J].Journal of the Academy of Equipment Command & Technology,2011,22(4):61-66(in Chinese). |
| Cited By in Cnki (12) | Click to display the text | |
| [13] | Xu Z W,Shi P,Zhao Y S.Optimal control of two-craft electromagnetic formation in circular orbit[C]//Advanced in the Astronautical Sciences Series:24th AAS/AIAA Space Flight Mechanics Meeting.San Diego,CA:Univelt Inc.,2014,152:2547-2561. |
| [14] | 张元文,杨乐平,朱彦伟,等.空间电磁对接的鲁棒协调控制[J].国防科技大学学报,2011,33(3):33-37. Zhang Y W,Yang L P,Zhu Y W,et al.Coordinated robust control of space electromagnetic docking[J].Journal of National University of Defense Technology,2011,33(3):33-37(in Chinese). |
| Cited By in Cnki (3) | Click to display the text | |
| [15] | 苏建敏,董云峰.利用人工势函数法的卫星电磁编队控制[J].北京航空航天大学学报,2012,38(2):213-217. Su J M,Dong Y F.Artificial potential function method for satellite electromagnetic formation control[J].Journal of Beijing University of Aeronautics and Astronautics,2012,38(2):213-217(in Chinese). |
| Cited By in Cnki (6) | Click to display the text | |
| [16] | 张皓.库仑航天器的动力学与控制研究[D].北京:北京航空航天大学,2012. Zhang H.The dynamics and control of coulomb spacecrafts[D].Beijing:Beihang University,2012(in Chinese). |
| [17] | 邵龙飞.电磁航天器在轨协同运动控制研究[D].北京:北京航空航天大学,2014. Shao L F.On-orbit operation cooperative control of electromagnetic spacecraft[D].Beijing:Beihang University,2014(in Chinese). |
| [18] | 赵育善,师鹏.航天器飞行动力学建模理论与方法[M].北京:北京航空航天大学出版社,2012:68-69. Zhao Y S,Shi P.Spacecraft flight dynamics modelling theory and method[M].Beijing:Beihang University Press,2012:68-69(in Chinese). |
| [19] | de Queiroz M S,Kapila V,Yan Q G.Adaptive nonlinear control of multiple spacecraft formation flying[J].Journal of Guidance,Control and Dynamics,2000,23(3):385-390. |
| Click browse the original |