



外骨骼是一种仿生机器人系统,最早由美国军方出于军事目的提出相关概念[1].外骨骼机器人通过在人体运动关节处施加外部驱动力矩以降低甚至替代操作者在运动或者负重任务过程中的自身关节出力,从而减少操作者能量消耗以延长任务时间或帮助残疾操作者实现正常运动能力.因此可以被应用于军事、医疗康复、消防救援等领域[2, 3].
作为一种结合了操作者智能和机械力量的典型人机一体化系统,外骨骼机器人的研究热点和难点主要集中于如何识别操作者的运动意图.对此国内外学者进行了深入的研究,并取得了众多成果.
美国加州大学伯克利分校在其设计的BLEEX(Berkeley Lower Extremity Exoskeleton)中提出灵敏度放大控制方法[4, 5].该方法构建了基于外骨骼结构的逆动力学模型,实时解算不同运动姿态下的关节力矩,并控制外骨骼产生相应的输出力矩作为正反馈补偿操作者关节输出力矩,使外骨骼敏锐地捕捉并放大操作者的运动意图,从而达到辅助支撑和运动的目的.这种方法的优势在于只需要测量外骨骼自身参数而不涉及操作者或两者间的交互信息,但是其控制效果受限于逆动力学模型的精度且易受系统参数扰动的影响.
由日本筑波大学研制的第一款商业外骨骼HAL(Hybrid Assistive Limb)采用肌电信号EMG(Electromyography)作为输入,根据运动关节周围肌肉组织表面所产生的微弱电信号来辨识该关节运动时所需力矩大小,从而驱动外骨骼辅助操作者[6, 7].这种方法虽然能够获取最为真实的操作者意图,但是却有着一些固有的缺陷,诸如测量噪音、穿戴麻烦、易受环境影响等[8].因此,像神经网络这样的智能方法被引入EMG信号处理中,以提高预测性能[9, 10, 11].但总体而言,EMG方法的应用仍然受到环境的制约.
人机系统内部的交互信息,通常表现为交互力,能够有效体现操作者与外骨骼之间的相对运动关系,因此也常被用于预测操作者运动.瑞士的康复训练外骨骼Lokomat借鉴了物体运动速度与所受作用力之间的阻抗特性,提出了基于交互力测量的阻抗控制方法.该方法实质上是一种双环控制,外部位置环用于将预定轨迹通过阻抗控制器转换为期望的力矩指令,然后内环的力跟踪控制实现对外骨骼的驱动,最终帮助患者完成康复训练任务[12, 13].但是,此方法需要操作者去适应外骨骼的轨迹而非外骨骼跟随操作者,故而更适合于运动轨迹相对固定的医疗康复训练机器人,例如ANdROS[14]和LOPES[15].
为了让外骨骼能够跟踪操作者运动,最近几年在阻抗控制的基础上提出了采用力外环和位置内环的导纳控制方法,该方法将交互力通过导纳控制器转化为外骨骼期望的运动轨迹以实现对操作者意图的识别和跟踪,成功实现了人机协调运动,因此成为了新的研究热点.美国西北大学在一个单自由度摆动外骨骼腿上分析了导纳控制的稳定条件[16]并得出了导纳控制能够增强腿部敏捷度的结论[17].北航虚拟现实技术与系统国家重点实验室将导纳控制应用于病人康复的主动训练阶段,通过调节导纳参数满足了训练中对于力和运动速度的不同需求[18].文献[19]则在单关节矫形器中提出了包含前馈预估力的非线性导纳控制这一最新研究成果.众多研究成果都表明导纳控制能够有效辨识操作者运动意图,并且具有非常简单的结构、易于实现的突出特点.
本文以可穿戴式下肢外骨骼为基础,研究了用于跟踪操作者腿部摆动的导纳控制.首先利用导纳控制器将操作者施加于外骨骼膝关节关节处的力(也即交互力)转化为期望的运动轨迹;传统的位置跟踪控制则最终保证了外骨骼小腿与操作者小腿之间的一致运动.通过构建包含交互信息的摆动模型,仿真验证了导纳控制算法的有效性,为实际运用打下理论基础. 1 下肢外骨骼结构
所设计的下肢外骨骼机器人主要用于辅助健康操作者完成负重行走任务,因此采用可穿戴式的拟人结构以避免出现运动干涉问题,最大限度确保操作者活动自由性和安全性.整个结构主要包括腰部支架、髋关节、大腿、膝关节、小腿、踝关节6个部分,如图 1所示.
 |
| 图 1 下肢外骨骼结构设计Fig. 1 Structure design of lower extremity exoskeleton |
通过分析人体下肢关节生物结构和运动特点,在满足大多数运动需求的前提下,对冗余自由度和次要自由度进行精简以降低结构复杂度并减轻整体质量.因此,髋关节设计为3个自由度:屈/伸、内收/外展和旋内/旋外;膝关节只保留与行走相关的屈/伸自由度;踝关节则利用虎克铰结构实现了两个自由度.此外,3个关节处均放置了能够适用于振动环境的WDA型导电塑料电位计用于采集转动角度信息;外骨骼足底在足跟、前脚掌和外骨骼小腿连接处3个关键位置设计放置了压力传感器,用于实现足底压力的测量.
在仿真分析不同运动模式下人体下肢关节功率消耗情况的基础上[20],确定采用膝关节处添加单独驱动的设计方案以达到减重和便携的目的,驱动元件为非对称阀控液压缸,如图 2所示.
 |
| 图 2 膝关节驱动结构Fig. 2 Driven architecture of knee joint |
下肢外骨骼的实际穿戴效果如图 3所示.整个外骨骼结构与操作者下肢呈现并联形式,在无动力情况下可由操作者通过绑带带动外骨骼腿部被动跟随运动.显然,这种由操作者和外骨骼结合而构成的人机系统以交互力的形式产生耦合,换而言之,交互力信息中包含着操作者的运动意图.因此,在操作者与外骨骼的接触位置(绑带)也设置了测力传感器以获取整个人机系统的交互力信息.考虑到有效交互力是平行而非垂直于操作者与外骨骼的接触平面,传统的拉压式压力传感器无法完成测量任务,故而向南京神源生智能科技有限公司定制了能够测量平行于安装平面拉力的S1-100NWL型接触力传感器,量程为100 N,线性度及重复性均可达到满量程的±0.02%.
 |
| 图 3 实际人机系统(无动力)Fig. 3 Practical human-machine system (unpowered) |
导纳理论来源于机械阻抗,是一种基于广义惯量、阻尼和刚度的等效网络思想,通过将实际的物理系统比拟成为一个具有导纳(或阻抗)特性的简单输入输出系统,构建起作用力与响应速度之间的联系.导纳是阻抗的倒数,定义为
式中:V(s)为响应速度;F(s)为施加的作用力;I、B和K分别为广义惯量、阻尼和刚度.
图 4给出了外骨骼的线性模型.图中Fh(s)代表外骨骼系统对操作者产生的阻力,也即两者之间的交互力;Vd(s)代表系统所期望的运动速度;下标“exo”代表外骨骼自身固有阻抗特性;下标“pow”代表动力元件表现出来的虚拟阻抗特性;Fexo(s)与Fpow(s)分别是两者在当前速度下所表现出的力响应,它们经过耦合后最终表现为外骨骼与操作者间的交互力.显然,此时系统表现出了设计中期望达到的阻抗特性Zd(s),与此同时,系统也实现了期望的导纳特性:
结合图 4和式(2)可以看出,外骨骼系统所表现出来的导纳特性由外骨骼自身固有结构特性和动力元件的运动特性共同决定.动力元件可以通过施加不同的控制而产生不同的虚拟导纳特性,从而决定最终的系统导纳,这正是导纳控制基础之所在.
 |
| 图 4 外骨骼线性模型Fig. 4 Linear model of exoskeleton |
因此,导纳控制的思想可以表述为,对于某一特定的力输入,通过施加额外的驱动控制去修改被控对象的输出响应,使整个系统的输入输出响应符合期望设计.简而言之,导纳控制就是用设计好的导纳参数屏蔽系统原有的导纳特性.
对于下肢外骨骼控制来说,当操作者的运动处于悬空摆动阶段时,外骨骼需要实现快速跟踪以避免阻碍正常运动.此时整个外骨骼系统应该具有较大的导纳特性以保证对操作者施加的作用力具有足够的灵敏反应,降低对操作者的阻碍作用,也即实现降低交互力的目的.下肢外骨骼摆动的导纳控制原理框图如图 5所示.图中,测量所得的交互力F(s)经过按照期望参数进行设计的导纳控制器转化为期望的运动速度指令Vd(s),经过积分后变成运动位置指令θd(s);然后利用传统
 |
| 图 5 导纳控制原理框图Fig. 5 Principle block diagram of admittance control |
PID控制算法实现整个下肢外骨骼系统的实际位置θexo(s)对期望位置的跟踪.此时,外骨骼系统的运动响应与交互力之间所表现出来的关系就等价于所设计出的期望导纳特性.若假设期望导纳设计成只具有较小的广义惯量,那么对于操作者来说,在摆动过程中所能感受到的外骨骼作用就等价于一个较小质量块的作用效果,因此导纳控制能够降低操作者与外骨骼之间的交互力,实现两者的协调运动. 3 人机系统动力学模型
目前的外骨骼系统模型分析中,往往只关注外骨骼自身的动力学特性或者是将操作者与外骨骼视为刚性连接的统一整体进行分析[4, 5, 20, 21],这些建模方式无法体现操作者与外骨骼之间始终存在的、无法忽视的交互影响.尤其对于以交互力为基础的导纳控制来说,建立一个包含有交互信息的人机系统动力学模型显得更为必要.
考虑所设计下肢外骨骼的驱动方式为膝关节单独驱动,因此摆动过程实质上是小腿绕大腿的旋转运动.若假定大腿相对固定,将操作者与外骨骼的绑带连接方式视为弹性连接,则可构建如图 6所示的人机系统摆动模型.
 |
| 图 6 人机系统摆动模型Fig. 6 Human-machine system swing model |
为了简便起见,假设外骨骼腿尺寸参数和质心位置与操作者一致,均为l与lc;操作者与外骨骼在两者的质心ch1和ce1处采用弹性连接,弹性系数为k.对图 6中所示结构采用D-H方法分别建立外骨骼坐标系{xeOye}和操作者坐标系{xhOyh},基坐标定义为{x0Oy0};定义关节转角方向以逆时针为正.根据上述定义,可按照运动学关系得出操作者和外骨骼各自模型的变换方程及其逆变换.
采用牛顿-欧拉迭代动力学算法构建人机系统的动力学方程.首先对操作者模型进行求解,其小腿关节的角速度、角加速度和原点线加速度在图 6所示的子坐标系h1下分别为



式(3)~式(5)中右下标用于说明当前变量的归属坐标系,左上标则说明当前变量的描述坐标系.
进而可得质心处线加速度:

已知质心处加速度即可根据牛顿方程获取作用在操作者小腿质心处的惯性力.然而,由于外骨骼小腿与操作者小腿之间存在一个弹性交互力,故而需要重新构建力平衡方程:

式中:hifhi为坐标系h中第i-1个关节对第i个关节所施加的作用力在子坐标系hi下的描述;hiFhci为坐标系h中第i个关节质心处所受交互力在子坐标系hi下的描述;mhihi hci则代表坐标系h中第i个关节质心处在子坐标系hi下所具有的惯性力.
hci则代表坐标系h中第i个关节质心处在子坐标系hi下所具有的惯性力.
弹性交互力与弹性系数和距离有关:

式中:h1Pche1为从操作者小腿质心ch1指向外骨骼小腿质心ce1的距离向量在操作者子坐标系h1中的表述,也即

上式中需要得知外骨骼小腿质心在操作者坐标系下的描述.考虑到两个坐标系共用同一个基坐标,因此可以先将外骨骼小腿的质心位置转换为基坐标系下的描述,然后再从基坐标系转换成为操作者坐标系下的描述.
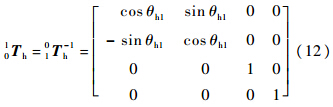
式中:e1Pce1为外骨骼小腿质心在外骨骼坐标系下的描述e1Pce1=[lc 0 0]T;10Te和01Th分别为外骨骼坐标系到基坐标的变换矩阵和基坐标到操作者坐标系的变换矩阵:
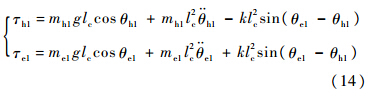
结合式(7)~式(12)可构建出加入人机交互力情况下的力平衡方程.又因为假设质量集中,惯性张量为零矩阵,即质心处力矩为零.故而利用欧拉方程构建力矩平衡方程,并最终求解矢状面上的关节力矩分量:

根据GB10000—1988(中国成年人人体尺寸)与GB/T17245—2004(成年人人体惯性参数)可获取人体下肢仿真参数:

根据所设计外骨骼结构确定仿真参数:
动力部分为传统的阀控非对称液压缸非线性模型,其仿真参数主要包括:油源压力Ps=7 MPa;伺服阀流量系数Cd=0.62;阀芯面积梯度ω=0.008 m;液压油密度ρ=870 kg/m3;弹性模量βe=1.4×109 N/m2;无杆腔和有杆腔活塞面积A1=1.96×10-3 m2,A2=1.47×10-3 m2;两腔初始体积V1=2×10-4 m3,V2=1.5×10-4 m3;忽略内外泄漏.
此外,重力加速度g=9.8 m/s2;绑带弹性系数k=3 000 N/m.
在匀速行走的情况下(通常速度在1 m/s左右),只考虑摆动时(即只有单脚支撑,另一只脚完全悬空),摆动腿的膝关节具有先向后屈,然后向前伸出的运动过程.这一运动形式可以简化成为钟摆运动,进一步地可用正弦运动进行近似.再考虑到步行的速度和幅度,故而设定操作者按照1 Hz固定频率做±10°的正弦摆动.另外为了便于观察,同时设定起始状态为小腿与大腿垂直.首先假定外骨骼无动力驱动,由操作者依靠绑带(交互力)带动外骨骼进行摆动.
图 7给出了无驱动情况下外骨骼跟踪操作者运动轨迹的效果.从图中可以看出,外骨骼沿操作者的运动轨迹有着明显的波动行为,这说明不施加控制情况下外骨骼的存在实际上对于操作者的摆动来说是一种额外附加的阻碍和干扰.这一判断可由图 8给出更为直观的佐证,相比于操作者未穿戴外骨骼摆动时的膝关节力矩,穿戴无驱动外骨骼摆动时的关节力矩不但在幅值上有明显的增大,而且还产生了抖振的现象,这无疑会导致操作者额外的能量消耗.
 |
| 图 7 无驱动外骨骼跟踪效果Fig. 7 Tracking performance of unpowered exoskeleton |
图 7与图 8的仿真结果一方面验证了人机系统模型的合理性,另一方面也显示出了对外骨骼施加有效控制的必要性.因此,设计导纳控制对外骨骼进行驱动以实现协调运动,其参数如下:

 |
| 图 8 操作者膝关节力矩对比Fig. 8 Comparison of operator’s knee joint torque |
内环位置PID控制参数为

采用导纳控制的下肢外骨骼摆动仿真结果如图 9和图 10所示.其中,图 9表明在导纳控制情况下,经历运动初期的短暂调整后,外骨骼精确地跟踪上了操作者的运动轨迹,其跟踪精度能够达到±0.3°以内.图 10则给出了无驱动情况下人机交互力与采用导纳控制情况下人机交互力的对比曲线,从图中可以看出,施加导纳控制后,交互力的峰值从将近6 N·m下降到了约1 N·m,削减了大约85%,并且明显抑制了高频抖动现象,从而减少了对操作者运动行为的阻碍.
 |
| 图 9 导纳控制跟踪效果Fig. 9 Tracking performance of admittance control |
 |
| 图 10 交互力矩Fig. 10 Interaction torque |
 |
| 图 11 辨识操作者运动意图Fig. 11 Identify operator’s motion intention |
图中显示出按照导纳原理所获得的期望轨迹高度接近操作者的实际运动轨迹,从而证明导纳控制能够有效地辨识出操作者的运动意图.
上述仿真结果证明了导纳控制能够有效地辨识出操作者摆动过程中的运动意图,生成相应的期望运动指令以控制下肢外骨骼准确跟踪操作者的运动轨迹,最终实现操作者和下肢外骨骼的协调运动. 5 结 论
本文研究了操作者穿戴下肢外骨骼进行摆动运动时的导纳控制方法,建立了单自由度的人机摆动系统动力学模型,得出的仿真结果证明导纳控制能够实现操作者与外骨骼的协调运动,降低运动过程中的交互力矩.
1) 导纳控制能够通过交互信息有效辨识出操作者的运动意图.
2) 考虑交互信息的人机系统模型能够反映出更为真实的运动行为.
3) 导纳控制能够屏蔽下肢外骨骼自身的固有机械导纳特性,降低对操作者施加的额外负担.
值得注意的是,较小的阻抗特性参数虽然能够增加系统的敏捷性却蕴含了丧失系统稳定性的风险.导纳控制研究和发展的一个关键热点在于如何设计期望导纳参数以保证系统的稳定性.因此借助李雅普诺夫稳定理论对采用导纳原理控制的外骨骼系统进行分析以获取参数设计原则将是后续研究中的一个重要内容.
| [1] | Cloud W.Man amplifiers: Machines that let you carry a ton[J].Popular Science, 1965, 187(5):70-73. |
| [2] | Schiffman J M, Gregorczyk K N, Bensel CK, et al.The effects of a lower body exoskeleton load carriage assistive device on limits of stability and postural sway[J].Ergonomics, 2008, 51(10):1515-1529. |
| Click to display the text | |
| [3] | Ozkul F, Barkana D E.Upper-extremity rehabilitation robot rehabroby:Methodology, design, usability and validation[J].International Journal of Advanced Robotic Systems, 2013, 10:1-13. |
| Click to display the text | |
| [4] | Racine J L.Control of a lower extremity exoskeleton for human performance augmentation[D].Berkeley, CA:University of California-Berkeley, 2003. |
| Click to display the text | |
| [5] | Steger R.Kim S H, Kazerooni H.Control scheme and networked control architecture for the BLEEX[C]//Proceedings 2006 IEEE International Conference on Robotics and Automation(ICRA).Piscataway, NJ:IEEE Press, 2006:3469-3476. |
| Click to display the text | |
| [6] | Sankai Y.Leading edge of cybernetics:Robot suit HAL[C]//2006 SICE-ICASE International Joint Conference.Piscataway, NJ:IEEE Press, 2007:1-2. |
| Click to display the text | |
| [7] | Sankai Y.HAL:Hybrid assistive limb based on cybernics robotics research[C]//Kaneko M, Nakamura Y.Springer Tracts in Advanced Robotics.Heidelberg:Springer Verlag, 2011:25-34. |
| Click to display the text | |
| [8] | Gopura R A R C, Kiguchi K, Yang L.SUEFUL-7:A 7DOF upper-limb exoskeleton robot with muscle model oriented EMG-based Control[C]//2009 IEEE/RSJ International Conference on Intelligent Robots and Systems.Piscataway, NJ:IEEE Press, 2009:1126-1131. |
| Click to display the text | |
| [9] | Kiguchi K.A study on EMG-based human motion prediction for power assist exoskeletons[C]//Proceedings of the 2007 IEEE International Symposium on Computational Intelligence in Robotics and Automation.Piscataway, NJ:IEEE Press, 2007:190-195. |
| Click to display the text | |
| [10] | 刘秀云.基于EMG-KJA神经肌骨动力学模型的下肢动作模式识别及运动轨迹预测[D].天津:天津大学, 2012. Liu X Y.Motion pattern recognition & kinematic trajectory prediction of lower limb based on EMG-KJA neuro-musculo-skeletal model[D].Tianjin:Tianjin University, 2012(in Chinese). |
| Cited By in Cnki | |
| [11] | 闫惠.外骨骼控制系统中表面肌电图信号的处理和识别[D].青岛:青岛大学, 2010. Yan H.The processing and recognition of surface EMG signals in exoskeleton control system[D].Qingdao:Qingdao University, 2010(in Chinese). |
| Cited By in Cnki | |
| [12] | Jezernik S, Colombo G, Keller T, et al.Robotic orthosis Lokomat:A rehabilitation and research tool[J].Neuromodulation:Technology at the Neural Interface, 2003, 16(2):108-115. |
| Click to display the text | |
| [13] | Jezernik S, Colombo G, Morari M.Automatic gait-pattern adaptation algorithms for rehabilitation with a 4-DOF robotic orthosis[J].IEEE Transactions on Robotics and Automation, 2004, 20(3):574-582. |
| Click to display the text | |
| [14] | Unluhisarcikli O, Pietrusinski M, Weinberg B, et al.Design and control of a robotic lower extremity exoskeleton for gait rehabilitation[C]//2011 IEEE/RSJ International Conference on Intelligent Robots and Systems:Celebrating 50 Years of Robotics.Piscataway, NJ:IEEE Press, 2011:4893-4898. |
| Click to display the text | |
| [15] | Veneman J F, Kruidhof R, Hekman E E G, et al.Design and evaluation of the LOPES exoskeleton robot for interactive gait rehabilitation[J].IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2007, 15(3):379-386. |
| Click to display the text | |
| [16] | Aguirre-Ollinger G, Colgate J E, Peshkin M A, et al.Design of an active one-degree-of-freedom lower-limb exoskeleton with inertia compensation[J].The International Journal of Robotics Research, 2011, 30(4):486-499. |
| Click to display the text | |
| [17] | Aguirre-Ollinger G, Colgate J E, Peshkin M A, et al.A 1-DOF assistive exoskeleton with virtual negative damping:Effects on the kinematic response of the lower limbs[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems.Piscataway, NJ:IEEE Press, 2007:1938-1944. |
| Click to display the text | |
| [18] | Wang D X, Li J T, Li C.An adaptive haptic interaction architecture for knee rehabilitation robot[C]//Proceedings of the 2009 IEEE International Conference on Mechatronics and Automation. Piscataway, NJ:IEEE Press, 2009:84-89. |
| Click to display the text | |
| [19] | Morbi A, Ahmadi M, Chan A D C, et al.Stability-guaranteed assist-as-needed controller for powered orhoses[J].IEEE Transactions on Control Systems Technology, 2014, 22(2):745-752. |
| Click to display the text | |
| [20] | 唐志勇, 谭振中, 裴忠才.下肢外骨骼机器人动力学分析与设计[J].系统仿真学报, 2013, 25(6):1338-1344. Tang Z Y, Tan Z Z, Pei Z C.The design and dynamic analysis of lower extremity exoskeleton[J].Journal of System Simulation, 2013, 25(6):1338-1344(in Chinese). |
| Cited By in Cnki (4) | |
| [21] | 赵彦峻, 徐诚.人体下肢外骨骼设计与仿真分析[J].系统仿真学报, 2008, 20(17):4756-4759. Zhao Y J, Xu C.Design and simulation of human lower extremity exoskeleton[J].Journal of System Simulation, 2008, 20(17):4756-4759(in Chinese). |
| Cited By in Cnki (27) |