



2. 中航工业西安飞行自动控制研究所, 西安 710065
2. AVIC Xi'an Flight Automatic Control Research Institute, Xi'an 710065, China
雷达干扰作为电子战的一个重要组成部分,在空战中发挥着越来越重要的作用.雷达干扰对飞机突防的影响是学者们研究的一个重要方向.文献[1, 2, 3]对飞机编队、单机在雷达电子对抗环境下的突防能力进行计算,对自卫干扰对突防飞机的敏感性以及生存能力的影响进行了研究,对雷达干扰对于空袭突防方的作战效能,对地面警戒雷达的发现概率和探测距离的影响进行了分析.文献[4, 5, 6]研究了针对地面雷达网络的多无人机协同距离欺骗干扰轨迹优化问题,通过对地面雷达网络进行协同欺骗干扰来产生虚假轨迹.文献[7]通过多架小型无人机的欺骗干扰产生虚假的目标.
未来空战是编队之间的对抗,如何根据交战双方的态势、雷达、武器、干扰性能对干扰资源进行最优分配是一个重要的研究方向.文献[8]提出了一种基于粒子群优化的多无人机协同干扰任务分配方法.文献[9]提出雷达发现概率下降因子来评价威胁度,以此提出了一种考虑协同自卫有源压制电子干扰效果的多目标攻击目标分配算法.文献[10]研究了多无人作战飞机协同干扰空战决策问题,根据干扰效能评估指标建立了协同干扰优化模型.
本文建立了空战中多机协同干扰任务分配模型,并建立了考虑干扰效果的多机协同探测加干扰任务分配模型.
1 协同干扰任务分配模型
影响飞机干扰性能的因素主要有干扰飞机与敌机雷达的功率、飞机与敌机的频段、飞机与敌机的干扰样式等,因此干扰性能优势主要由干扰功率优势、干扰频段优势、干扰样式优势构成.
1.1 干扰功率优势
敌方飞机、己方被掩护目标、己方干扰机的干扰示意图如图 1所示.
 |
| 图 1 干扰示意图Fig. 1 Schematic diagram of jamming |
与敌机雷达距离为DT的飞机到达敌机雷达接收机的信号功率[11, 12]为

一般地,干扰信号和所需的有用信号将从不同方向达到敌机雷达接收机,则敌机雷达它们方向上的天线增益也将不同.到达敌机雷达接收机输入端的干扰信号功率[11, 12]为

干信比J/S即为干扰信号强度与所需信号强度的比值[11, 12],由式(1)和式(2)可得干信比为

将在某一虚警概率条件下雷达检测概率Pd下降到0.1时的干信比称为雷达的干扰压制系数[11, 12]:

令干信比为压制系数,则式(3)变形得到:

烧穿距离[11]是指在干扰下,雷达刚好有足够的信号质量来探测跟踪目标的雷达到目标的距离,则由式(4)和式(5)可得烧穿距离为

用干扰后敌机雷达探测距离减少的程度来表示干扰的效果,则可定义干扰功率优势:

1.2 干扰频段优势
工作频率是雷达工作的一个重要技术指标,频率因素也是干扰机能否成功干扰的重要因素[10, 13].设干扰机的工作频段为(fj1,fj2),敌机雷达的工作频段为(fr1,fr2),则干扰机工作频段与敌机雷达的工作频段的可能覆盖关系如图 2所示.
 |
| 图 2 干扰机与敌机雷达工作频段关系图Fig. 2 Radar frequency band relationship between jamming aircraft and enemy aircraft |
干扰机的工作频段对敌机雷达的工作频段的瞄准程度越大,进入雷达接收机的干扰能量就越多,干扰效果就越好,反之则越差,则可定义干扰工作频段优势:
1.3 干扰样式优势
只有当干扰机所具有的干扰样式与被干扰的敌机雷达体制相匹配时,才能取得较好的干扰效果[10, 13].对于某种干扰样式,若被干扰的敌机雷达具有相应的抗干扰措施,则这种干扰样式取得的干扰效果往往会很低;反之,若被干扰的敌机雷达没有相应的抗干扰措施,则这种干扰就很可能成功.
根据现在已知的一些典型的干扰样式对抗干扰样式的干扰效果,可得到干扰样式优势库.在实际干扰作战中,根据干扰机具有的干扰样式以及被干扰敌机雷达的抗干扰样式,选取优势库中对应的干扰样式优势组成该情形下的干扰样式优势矩阵W.根据模糊运算的最大最小运算算子,可定义干扰样式优势值为

1.4 干扰机干扰能力优势
干扰机干扰能力为飞机能执行干扰任务的能力,可根据干扰机的工作性能、飞机的航程等得到,并对其进行归一化处理.则可根据己方编队飞机的干扰能力的集合得到干扰能力优势函数:

1.5 干扰态势优势函数
只要干扰功率优势、干扰频段优势、干扰样式优势和干扰能力优势中有一种干扰优势为0,则己方干扰机不能对敌机进行干扰,则由式(7)~式(10)可建立干扰态势优势函数为

1.6 空战效能优势函数
根据己方飞机空战能力指数CF,敌方飞机空战能力指数CT[14],构建空战效能优势函数:
1.7 总的干扰优势函数
根据己方干扰机以及敌机雷达的性能,则由式(7)~式(12)分别计算己方编队M架飞机相对敌方编队N架飞机的干扰功率优势、干扰频段优势、干扰样式优势以及空战效能优势,干扰功率优势矩阵Tjp、干扰频段优势矩阵Tjf、干扰样式优势矩阵Tjs、干扰态势优势矩阵T′j及空战效能优势矩阵Tc都是M×N的矩阵.
当己方飞机对敌方飞机的干扰态势优势为0时,认为该飞机对敌方飞机的总的干扰优势也为0.综合考虑干扰态势优势矩阵和敌我双方的空战效能优势矩阵可得到总的干扰优势矩阵:
1.8 干扰任务分配模型
根据干扰性能优势函数,建立多机协同干扰任务分配模型:

2 协同探测、攻击任务分配模型 2.1 干扰后敌机的距离性能
在对敌机实施干扰后,敌机雷达的最大探测距离减少为受干扰后的烧穿距离,若此时其导弹的最大发射距离、最大/最小不可逃逸距离大于烧穿距离,由于此时敌机探测能力的限制,它们都应该变为干扰后的烧穿距离.
由敌我双方的态势以及双方的性能,可得出探测、攻击优势,敌我双方态势图如图 3所示[15].
 |
| 图 3 敌我双方态势图Fig. 3 Situation for both sides |
根据敌机方位角和己方飞机的雷达的最大探测角φFrmax,构建探测方位角优势:

由脉冲多普勒雷达的探测特征[16],根据敌机进入角,构建探测进入角优势:

根据双方的距离和己方机载雷达的最大探测距离DFrmax,构建探测距离优势:


2.3 己方飞机对敌方飞机攻击能力
根据敌机方位角,己方导弹的最大攻击角度φFMmax和己方导弹不可逃逸区最大角度φFMkmax,构建攻击角度优势:

根据双方的距离,己方导弹最大攻击距离DFMmax,己方导弹最大/最小不可逃逸区距离DFMkmax和DFMkmin,构建攻击距离优势:

根据敌方飞机速度VT,己方飞机速度VF,构建攻击速度优势:


2.4 己方飞机受到的敌方飞机威胁度
根据敌机航向角,敌机雷达最大搜索角度φTrmax,敌方导弹的最大攻击角度φTMmax,敌方不可逃逸区最大角度φTMkmax,构建角度威胁因子:
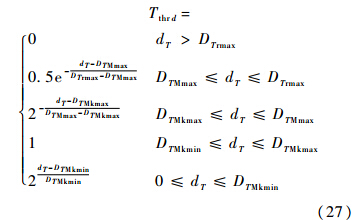
根据双方距离,敌方飞机雷达最大搜索距离DTrmax,敌方导弹最大攻击距离DTMmax,敌方导弹最大/最小不可逃逸区距离DTMkmax和DTMkmin,构建距离威胁因子:
根据敌方飞机速度VT,己方飞机速度VF,构建速度威胁因子:

则由式(26)~式(28)可得己方飞机受到的威胁度:

3 多机协同探测、攻击任务分配 3.1 总的探测、攻击优势矩阵
由式(12)、式(21)、式(25)和(29)分别计算己方编队M架飞机相对敌方编队N架飞机的空战效能优势,探测态势优势、攻击态势优势以及威胁度.从而得到敌我双方的空战效能优势矩阵Tc、探测态势优势矩阵T′det、攻击态势优势矩阵T′atc和威胁度矩阵Tthr和,它们都是M×N的矩阵.
本文以己方每架飞机受到的平均威胁度为己方飞机受到的威胁,即己方飞机受到的平均威胁度越大,其受到的威胁就越大,得到己方飞机的受到威胁矩阵:

本文以敌方每架飞机对己方编队飞机的平均威胁度为地方编队飞机的价值,即敌方飞机对己方飞机的平均威胁度越大,则其价值就越大,得到敌方飞机的价值矩阵:

当己方飞机对敌方飞机的探测态势优势为0时,认为该飞机对敌方飞机的总的探测优势也为0;当己方飞机对敌方飞机的攻击态势优势为0时,认为该飞机对敌方飞机的总的攻击优势也为0.综合考虑探测态势优势矩阵、受到的威胁度矩阵、敌方飞机价值矩阵和敌我双方的空战能力矩阵可得到总的探测优势矩阵、总的攻击优势矩阵:

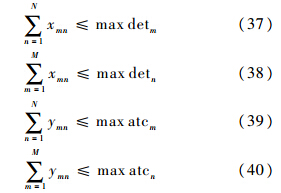
3.2 多机协同探测攻击任务分配模型
多机协同作战时,一方面要求探测优势最大,另一方面要求攻击优势最大,这是一个多目标优化问题,采用加权求和的方法将多目标决策问题转换为单目标优化问题,为各子目标函数赋予相应的权值,权值的大小体现了各子目标函数的重要程度.建立多机协同探测、攻击任务分配模型:

3.3 基于遗传算法的任务分配
多机协同干扰分配模型以及多机协同探测加干扰分配模型是典型的非线性规划模型,对于这种复杂的多变量非线性优化问题,可采用遗传算法来求解[17].与传统的匈牙利等传统矩阵操作计算方法相比,遗传算法可以求解己方飞机与敌机数量不等,以及己方一架飞机执行对多架敌机的任务或者一架敌机的任务需要多架己方飞机执行的分配问题.
本文中遗传算法采用二进制编码,图 4为编码示意图,编码为长度是M×N的一维数组,数组从前到后均匀地分为M段,每段有N个元素,每一段都表示一架飞机的任务分配情况,1表示将该任务分配给该飞机,0表示不分配.
 |
| 图 4 编码示意图Fig. 4 Coding schematic diagram |
本文中种群大小为500,对多机协同干扰任务分配采用式(14)计算适应值,对多机协同探测攻击任务分配采用式(34)计算适应值,采用轮盘赌选择法进行选择,交叉算子取0.8,变异算子取0.1,最大进化代数取100代.
4 仿真结果与分析
己方由5架飞机组成空中编队,初始位置分别为(-20,0)km、(-10,10)km、(0,0)km、(10,10)km、(20,0)km,x方向速度为0m/s,y方向速度为300m/s;敌方由5架飞机组成空中编队,初始位置分别为(-15,120)km、(-5,110)km、(-5,120)km、(-5,130)km、 (5,120)km,x方向速度为150m/s,y方向速度为-200m/s;敌我双方飞机处于同一水平高度匀速运动,双方的空战效能都为1.假设己方所有飞机的干扰能力都相同,己方每架飞机最多能执行探测、攻击任务的数目分别为2、2;敌方每架飞机最多需要被1架飞机探测、被1架飞机攻击.假设所有己方飞机的性能都相同,所有敌方飞机的性能都相同,参考典型第三代战机的性能数据,敌我双方飞机的性能如表 1所示.
| 飞机归属 | 最大探测角/(°) | 最大攻击角/(°) | 不可逃逸角/(°) | 雷达探测距离/km | 最大发射距离/km | 最大不可逃逸距离/km | 最小不可逃逸距离/km |
| 己方 | 90 | 50 | 30 | 200 | 120 | 70 | 30 |
| 敌方 | 70 | 35 | 20 | 160 | 80 | 50 | 30 |
本文中假设已知的干扰样式库中,己方存在3种干扰样式,敌机雷达存在3种抗干扰样式,且令敌机雷达不存在抗干扰样式时,己方的干扰样式得益为1,干扰样式得益库如表 2所示.
| 干扰样式 | 抗干扰样式 | |||
| 1:无 | 2:频率捷变 | 3:抗拖距 | 4:PD | |
| 1:瞄准 | 1 | 0.84 | 0.42 | 0.43 |
| 2:距离拖引 | 1 | 0.52 | 0.68 | 0.46 |
| 3:角度拖引 | 1 | 0.72 | 0.74 | 0.72 |
| 注:PD—脉冲式多普勒. | ||||
己方干扰机的干扰发射功率为1kW,干扰天线增益为10dB,雷达截面积为5m2;目标雷达的发射功率为1kW,天线主瓣增益为20dB,天线旁瓣增益为0dB,雷达干扰压制系数为71dB;己方飞机的其他干扰性能以及敌机雷达的其他性能如表 3所示.
| 飞机编号 | 己方飞机 | 敌方飞机 | ||
| 干扰样式 | 干扰工作频段/MHz | 抗干扰样式 | 干扰工作频段/MHz | |
| 1 | 1,3 | (5000,20000) | 2,3,4 | (4000,8000) |
| 2 | 2 | (6000,20000) | 1 | (5000,9000) |
| 3 | 2,3 | (7000,20000) | 1,2,3 | (6000,10000) |
| 4 | 3 | (8000,20000) | 1,3,4 | (7000,12000) |
| 5 | 1,2 | (9000,20000) | 3,4 | (8000,10000) |
干扰任务分配结果如图 5所示,黑色的箭头将己方飞机与它的干扰目标连接起来;干扰任务分配的优势直方图如图 6所示,黑色直方图表示己方飞机对其干扰目标的干扰优势值.可以看出,分配结果使得协同干扰任务分配的整体优势最大.
 |
| 图 5 干扰任务分配结果Fig. 5 Allocation results of jamming task |
 |
| 图 6 干扰优势直方图Fig. 6 Histogram of jamming superiority |
干扰后敌方飞机距离性能发生改变,如表 4所示,干扰前后敌方飞机的雷达探测距离直方图如图 7所示,其中黑色为干扰前的探测距离,白色为干扰后的探测距离,可以看出干扰后敌机雷达最大探测距离大幅度降低.
 |
| 图 7 敌方雷达最大探测距离直方图Fig. 7 Histogram of enemy radar’s maximum detection range |
| km | ||||
| 敌机编号 | 雷达探测距离 | 最大发射距离 | 最大不可逃逸距离 | 最小不可逃逸距离 |
| 1 | 88.2395 | 80 | 50 | 30 |
| 2 | 88.6011 | 80 | 50 | 30 |
| 3 | 88.6011 | 80 | 50 | 30 |
| 4 | 95.9124 | 80 | 50 | 30 |
| 5 | 92.4733 | 80 | 50 | 30 |
考虑干扰后的探测任务和攻击任务分配见图 8、图 9,黑色箭头将己方飞机与任务目标相连接;探测任务分配和攻击任务分配的优势直方图见图 10、图 11,黑色直方图表示己方飞机对其任务目标的任务优势值.可以看出,任务分配结果使得整体的探测任务和攻击任务优势最大.
 |
| 图 8 探测任务分配结果Fig. 8 Allocation results of detecting task |
 |
| 图 9 攻击任务分配结果Fig. 9 Allocation results of attacking task |
 |
| 图 10 探测优势直方图Fig. 10 Histogram of detecting superiority |
 |
| 图 11 攻击优势直方图Fig. 11 Histogram of attacking superiority |
1) 对空战中影响干扰的因素进行了建模与分析,建立了多机协同干扰优势模型,对多机协同干扰任务分配进行建模分析.
2) 在空战干扰效果的基础上,建立了多机协同探测、攻击优势模型,对多机协同探测、攻击任务分配进行了建模分析.
3) 未来空战双方位置可能存在垂直高度差,而研究考虑垂直高度差的多机协同干扰、探测、攻击任务分配具有重要的意义,是作者以后研究的重要方向.
| [1] | Kim J,Hespanha J P.Cooperative radar jamming for groups of unmanned air vehicles[C]//Proceedings of the IEEE Conference on Decision and Control.Piscataway,NJ:IEEE Press,2004,1:632-637. |
| Click to display the text | |
| [2] | Anderson T J,Mathiasmeier K J.A strategy for assessing air-borne electronic attack platform survivability[C]//Proceedings of the 49th Structures,Structural Dynamics and Materials Conference.Reston:AIAA,2008:1-8. |
| [3] | 郭凤娟,张安,曹璐.自卫干扰对无人机敏感性的影响研究[J].计算机工程与应用,2011,47(2):220-222. Guo F J,Zhang A,Cao L.Research on influence of SSJ on sensitivity of UAV[J].Computer Engineering and Applications,2011,47(2):220-222(in Chinese). |
| Cited By in Cnki (4) | |
| [4] | Lee I H,Bang H.Cooperative control of multiple electronic combat air vehicles for electronic attack[C]//Proceedings of the SICE Annual Conference 2008.Tokyo:Society of Instrument and Control Engineers (SICE),2008:2127-2130. |
| [5] | Purvis K B,Astrom K J,Khammash M.Online control strategies for highly coupled cooperative UAVs[C]//Proceedings of the 2007 American Control Conference.Piscataway,NJ:IEEE Press,2007:3961-3966. |
| Click to display the text | |
| [6] | Xu Y,Basset G. Virtual motion camouflage based phantom track generation through cooperative electronic combat air vehicles[J].Automatica,2010,46(9):1454-1461. |
| Click to display the text | |
| [7] | Ilaya O,Bil C,Evans M.Distributed and cooperative decision making for multi-UAV systems with application to collaborative electronic warfare[C]//Proceedings of the 7th AIAA Aviation Technology,Integration and Operations Conference.Reston:AIAA,2007:1-13. |
| Click to display the text | |
| [8] | Cruz J B Jr,Chen G S,Li D X,et al.Particle swarm optimization for resource allocation in UAV cooperative control[C]//Proceedings of the 2004 AIAA Guidance,Navigation,and Control Conference and Exhibit.Reston:AIAA,2004:2549-2559. |
| Click to display the text | |
| [9] | 耿涛,张安. 考虑协同电子干扰效果的空战多目标分配[J].火力与指挥控制,2012,37(3):121-123. Geng T,Zhang A.Multi-target assignment based on cooperative electronic jamming effectiveness[J].Fire Control & Command Control,2012,37(3):121-123(in Chinese). |
| Cited By in Cnki | |
| [10] | 薛羽,庄毅,张友益,等.基于启发式自适应离散差分进化算法的多UCAV协同干扰空战决策[J].航空学报,2013,34(2):343-351. Xue Y,Zhuang Y,Zhang Y Y,et al.Multiple UCAV cooperative jamming air combat decision making based on heuristic self-adaptive discrete differential evolution algorithm[J].Acta Aeronautica et Astronautica Sinica,2013,34(2):343-351(in Chinese). |
| Cited By in Cnki (7) | |
| [11] | Adamy D. EW101:电子战基础[M].王燕,朱松,译.北京:电子工业出版社,2009:177-185. Adamy D.EW101:a first course in electronic warfare[M].Translated by Wang Y,Zhu S.Beijing:Electronic Industry Press,2009:177-185(in Chinese). |
| [12] | Adamy D. Introduction to electronic warfare modeling and simulation[M].Boston:Artech House,2003:91-99. |
| [13] | 王国玉,汪连栋. 雷达电子战系统数学仿真与评估[M].北京:国防工业出版社,2004:402-408. Wang G Y,Wang L D.Mathematical simulation and evaluation of radar EW system[M].Beijing:National Defence Industry Press,2004:402-408(in Chinese). |
| [14] | 朱宝鎏,朱荣昌,熊笑非.作战飞机效能评估[M].2版.北京:航空工业出版社,2006:65. Zhu B L,Zhu R C,Xiong X F.Fighter plane effectiveness assessment[M].2nd ed.Beijing:Aviation Industry Press,2006:65(in Chinese). |
| [15] | 肖冰松,方洋旺,夏海宝,等.多机协同对空目标探测与攻击任务的最优分配[J].火力与指挥控制,2011,36(6):19-23. Xiao B S,Fang Y W,Xia H B,et al.Optimal allocation of aerial target detection and attack in cooperative multi-fighter air combat[J].Fire Control & Command Control,2011,36(6):19-23(in Chinese). |
| Cited By in Cnki (5) | |
| [16] | 崔晓宝,李楠. 机载PD雷达对机动目标探测盲区计算模型研究[J].火控雷达技术,2008,37(3):36-40. Cui X B,Li N.Research on calculation models for detection blind zone of airborne PD radar against maneuvering targets[J].Fire Control Radar Technology,2008,37(3):36-40(in Chinese) |
| Cited By in Cnki (9) | |
| [17] | Shima T,Rasmussen S J,Sparks A G,et al.Multiple task assignments for cooperating uninhabited aerial vehicles using genetic algorithms[J].Computers & Operations Research,2006,33(11):3252-3269. |
| Click to display the text |