



波音737、波音787蒙皮装配的钻孔和铆接,以及空客的A320机翼组件装配和A380机身腹部检查口盖壁板的钻孔和铆接等都是用机器人完成[1, 2, 3, 4],这集中反映了国外飞机先进装配连接技术的现状和发展趋势:柔性化与自动化装配,高质量、高效率装配.自主移动制孔机构是轻型自动化装配系统的典型代表,它是由空客与M.TORRES,SERRA公司联合推出的多足并联自主移动制孔机构,结合末端执行器和飞机装配工艺技术的轻型自动化飞机装配系统[5],具有高精度、刚柔耦合的特点.文献[5]中提到空客等联合研发的FDH和SAMPA机器人已应用于A380等实际生产,国内上海交通大学研制了一台配有18个电机的飞机制孔六足仿生步态自主移动制孔机构[6],北航与南航合作研发了一台航空制孔机器人[7, 8],他们都采用传统的定自由度设计,在爬行过程中不具有变自由度特性,部分运动轴处于闲置状态,多工况适应能力较弱.
1998年,Dai等[9]等通过研究包装纸盒及花样折纸等工艺品提出了变胞机构的概念,次年与张启先院士[10]一起将变胞机构引入国内,之后众多学者对其展开了矩阵演变、综合算法、变胞源机构和变胞生物进化理论等研究[11, 12, 13].刘川禾等基于机构拓扑理论研究了变胞机构的变拓扑结构组成理论[14],为变拓扑结构的机构分析和综合奠定了理论基础.变胞机构凭借其具有变拓扑结构、变自由度和多工况适应能力而被应用,如:空间伸展臂、特种机器人、伦敦大学利用变胞原理开发研制出变胞手[15]、丁希伦等开发了星球变胞探测车[16]等.
自主移动制孔机构应用于飞机装配时,要实现环向位移移动(记为前进x方向),在此阶段机构无需额外的不可控转动自由度;到达工位后,通过侧滚(A角摆动)、俯仰(B角摆动)调姿到达制孔法矢,再由末端执行器实现x,y,z方向的制孔移动,共5自由度运动.针对这种不同工况下要求变自由度的特性,本文提出了一种双偏心变胞源机构,结合杨廷力等[17]的机构拓扑结构设计理论研制了一种具有变胞功能的自主移动制孔机构.对机构进行了运动学求解,给出了基于各足伸缩量的机构调姿控制方法.同时绘出了调姿运动中各足偏移量分布,为双偏心变胞源机构的尺寸设计提供依据. 1 双偏心变胞源机构
变胞机构是一种可根据环境和工况的变化,从一种机构形式(构态)转变为另一种(或多种)机构形式的变拓扑机械系统,用于满足多功能的实际需求[18].而如何根据实际任务对变胞机构进行综合,结合变拓扑理论设计出满足要求的变胞源机构[12],建立变胞机构构型设计理论与方法体系,成为目前阻碍变胞机构发展及应用的主要难题.
本文根据变胞理论,提出了一种双偏心变胞源机构,如图 1所示,有两个转动副和一移动副插销构成.它具有非锁紧自由适应补偿状态a1和锁紧状态a2两种功能状态.它的变胞功能是采用锥形插销和锁紧定位孔来实现的,具体是由跟双偏心机构转轴R2相连的移动副T实现锥形插销的上下移动,完成a1与a2两种功能状态的切换.锁紧定位孔在与R1副相连的板上,锥形插销的末端具有一段伸长的圆杆,在a1状态,双偏心小范围内自由适应调整时,避免锥形插销移出定位孔,保证能顺利地变胞到a2状态.定位孔的大小需满足双偏心机构应用所要求的自由适应调整范围.
 |
| 图 1 双偏心变胞源机构两种状态Fig. 1 Two phases of the double eccentric source metamorphic mechanism |
处于a1状态下的双偏心机构的自由二维适应调整原理如图 2所示,由两连杆OO1,O1O2采用旋转副相连,O处是固定端旋转副,O1处是移动端旋转副,O2可实现平面内无极数位移调整.若两偏心量相等为r,OO1绕O转动α,O1O2绕O1转动β,则点O2在阴影区域内移动,坐标为
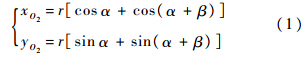
若O2初始时与O重合,则O2可在半径2r的圆形阴影区域内活动,此时双偏心机构具有该区域内的二维自由调整适应能力.
 |
| 图 2 双偏心机构原理Fig. 2 Principle of double eccentric mechanism |
本机构的转动副由两个大小不同的轴承组合嵌套的形式来实现,机构的变胞功能采用小型气缸带动锥形插销实现.锥形插销由气缸抬起,为a1状态;锥形插销由气缸带动插入锁紧孔,机构锁死,为a2状态,机构内相对位置回复到初始状态. 2 自主移动机构设计及其变胞分析
自主移动制孔机构具有与一般运动机构不同的设计需求,主要表现在:①负载相对较大,工作时制孔力、压紧力等载荷叠加,大概1 500 N,考虑末端执行器的自重,移动机构相对负载较大;②要求结构尽量轻,以便可靠地吸附于飞机表面上进行工作;③精度要求较高,一般孔定位精度±0.2 mm,法向制孔垂直度要求±0.5°,孔径精度±0.02 mm,孔壁粗糙度Ra1.6,锪窝深度精度0.05 mm,这对整个系统的定位精度提出了极高的要求;④刚性要求较高,保证制孔精度和工作载荷的前提下,还要考虑振动和结构优化等因素.2.1 自主移动制孔机构设计
为适应自主移动机构爬行和制孔调姿的多种工况,不增加闲置运动轴数量,本文基于双偏心变胞源机构,运用机器人机构变拓扑结构设计理论,设计了一种具有变胞功能的自主移动制孔机构,机构简图如图 3所示.
 |
| 图 3 自主移动制孔机构简图Fig. 3 Autonomous mobile drilling mechanism sketch |
机构由末端执行器,xy框、内框、外框以及与其相连的8足组成.足1,2,5,6固连于内框,足3,4,7,8固连于外框,内框与外框通过两个平行的x向移动副相连.末端执行器通过一个x向移动副与xy框相连,xy框通过一个y向移动副与内框相连.末端执行器有检测法矢用的4个激光测距传感器和一确定制孔位置的工业摄像头.8足为8条支链,支链1为SP(S表示球副;P表示移动副,与框身垂直),支链2为SPP(一P副垂直于框身,一P副平行于x方向),其余支链为六自由度的SRRP(P副与框身垂直),其中RR是双偏心变胞源机构,各支链中与框身垂直的P副为驱动副.
对于本文提出的自主移动机构,和一般的腿式机器人不同,由于通过足上真空吸盘与产品相固定,在飞机表面任何位置(包括垂直吸附和倒吊吸附的工作状态)均能保持稳定,吸盘的面积需根据机构自重、制孔载荷和压紧力进行计算.本文设计的原型系统,要保证垂直吸附和倒吊吸附的工作状态下可靠工作,需直径200 mm的吸盘.各足基本只承受拉伸或压缩载荷,这种八足并联形式的自主移动机构的承载能力、稳定性和刚度能较好地满足要求. 2.2 变胞功能阶段分析
自主移动制孔机构在各个阶段功能需求不同,通过双偏心变胞源机构实现机构行走功能阶段和法向调姿制孔功能阶段二者之间的相互切换:
1) 行走功能阶段:行走过程中,机构仅需有x,y,z 3方向的移动自由度,额外的A,B摆自由度会影响机构的行走稳定性.故在行走功能阶段,双偏心变胞源机构变胞为a2状态,使机构整体仅具有3个移动自由度,自主移动制孔机构行走采用内外框架交替前进的方式实现.首先八足真空吸盘完全吸附于机身;外框4足吸盘失效,由内框4足独立吸附;外框4足驱动副带动各足z向抬升,外框在x向驱动副作用下,相对内框向前运动,实现外框的x向移动;外框各足驱动副带动各足z向下降直到机身表面,真空吸盘吸附;内框4足吸盘失效,由外框4足独立吸附.如此交替重复前进到达目标区域,如图 4所示.
 |
| 图 4 行走功能阶段简图Fig. 4 Sketch of walking phase |
2) 法向调姿制孔功能阶段:到达目标区域后,8足吸附于机身表面,双偏心变胞源机构变胞为a1状态,内外框移动副抱死,框体视为动平台,如图 5所示.xy框带动末端执行器移动;由工业摄像头扫描确定制孔位置T;再由4个激光测距传感器得出制孔目标法矢[19],记为n=(l,m,n)T.动平台与定平台(机身)之间由1-SP,1-SPP,6-SRRP共8支链连接.根据机构拓扑学中基于方位特征的自由度分析[17],支链2中支链SP与支链SPP组成的单开链SOC{-S1-P1P2⊥P20-S2-}限制了动平台的绕z轴转动自由度,此时机构具有x,y,z,A摆、B摆共五自由度.机构进行调姿,通过八足驱动副调整各足长度,实现动平台俯仰与侧滚,使末端执行器法矢n0与目标法矢n重合.调姿过程中各足末端x,y向的偏移量由双偏心变胞源机构进行自由适应.
 |
| 图 5 法向调姿制孔功能阶段简图Fig. 5 Sketch of normal posture alignment & drilling phase |
法向调姿后,造成末端执行器刀具点坐标偏移.末端执行器在内框内具有x,y向两移动自由度,调整刀具点至目标位置.最终8足同步下蹲实现制孔动作,末端执行器上配有最大输出力1 000 N、保压行程100 mm的气缸提供蒙皮单向制孔所需的压紧力,以减少制孔毛刺和夹层切削,保证制孔质量[20]. 3 自主移动制孔机构实现 3.1 机构运动学求解
机构运动学求解是自主移动制孔机构调姿运动算法的基础,也是机构尺寸设计的依赖.
根据螺旋理论及其修正的自由度G-K公式[21],分析得自主移动制孔机构在调姿制孔功能阶段,具有x,y,z 3个方向的移动,A,B摆两个转动,共五自由度.下面用运动学逆向解析对自主移动制孔机构的调姿制孔功能阶段进行运动学求解.
令足i(i=1,2,…,8)上的球副位置为Si(i=1,2,…,8),其足上移动副位置为Pi(i=1,2,…,8).建立如图 5所示右手正交坐标系.
定坐标系:Ob-xbybzb,原点Ob位于S1中心,xb为初始状态下P2P1方向,yb为初始状态下P1P6方向(初始时P1P6·P2P1=0),zb为xb和yb确定的右手坐标系.
动坐标系:Om-xmymzm,固定在机构动平台上,原点Om位于P1,zm与足升降副平行,xm平行于P2P1方向.
初始状态动坐标系与定坐标系平行.
根据机器人坐标系变换理论,本机构调姿运动定义为由初始状态n0=(0,0,1)T先绕xm轴旋转 x,后绕ym轴旋转y,满足了调姿后足2仅有一个xm向偏移.本机构运动学反解即求到达位姿(x,y)、制孔期望法矢n=(l,m,n)T时,八足升降的位移量Δli,调姿造成的各足xm,ym向偏移量;同时给出了调姿后的刀具偏移补偿量.
x,后绕ym轴旋转y,满足了调姿后足2仅有一个xm向偏移.本机构运动学反解即求到达位姿(x,y)、制孔期望法矢n=(l,m,n)T时,八足升降的位移量Δli,调姿造成的各足xm,ym向偏移量;同时给出了调姿后的刀具偏移补偿量.
由空间坐标系A,B角旋转变化,得动坐标系Om与定坐标系Ob的坐标转换矩阵Rbm,如式(2)所示.因空间旋转矩阵为正交矩阵,故Rbm-1=RbmT.
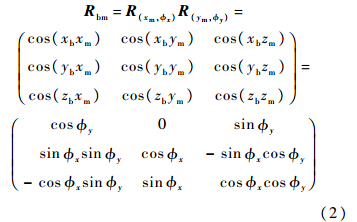 y,-sin xcos y,cos xcos y)T=(l,m,n)T.由此解出x,y,进而得到转换矩阵Rbm.
y,-sin xcos y,cos xcos y)T=(l,m,n)T.由此解出x,y,进而得到转换矩阵Rbm.足1为固定足,调姿时一般不升降.由机构参数得,坐标系旋转变化后,坐标系平移了

任一点D在定坐标系位置坐标矢量Db和在动坐标系的位置矢量Dm关系为


设点Si在坐标系Ob-xbybzb和Om-xmymzm的坐标分别为Sib=(xSib,ySib,zSib)T(该坐标根据实际工况与机构参数可知)和Sim=(xSim,ySim,zSim)T
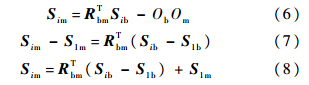
调姿前Si在Om-xmymzm坐标为

将S1b=(0,0,0)T和S1m=(0,0,-h)T代入式(8),可得调姿前后各足偏移量为


 x,y),即目标法矢n时各足驱动量,其正值表示伸长,负值表示缩短.同理,可得调姿后刀具点的偏移补偿量:
x,y),即目标法矢n时各足驱动量,其正值表示伸长,负值表示缩短.同理,可得调姿后刀具点的偏移补偿量: 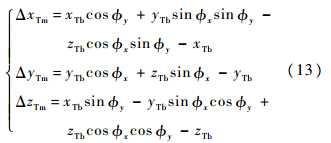
调整法向后,根据式(13)的计算结果,依靠xy框的x向和y向运动机构调整相应的ΔxTm,ΔyTm偏移值,依靠8条腿同步调整z向来调整ΔzTm偏移值,从而实现调姿后刀具点不变. 3.2 机构尺寸设计
在飞机装配筒段蒙皮对接中,一般曲率半径约为3 m,实际应用中,机构环向爬行工作,调姿时摆角A在±2°,B在±5°之内即可满足工艺需求.考虑到末端执行器的尺寸与工作行程,本文设计的自主移动制孔机构总体尺寸为870 mm×462 mm×500 mm.实际工况中,各足球铰在定坐标系中的坐标值如表 1中的xSib,ySib,zSib各列所示,因蒙皮曲率的原因,外足在定坐标系中的坐标值会低于内足.
根据3.1节给出的运动学求解式(11)和式(12),计算了自主移动制孔机构由初始状态调姿到(+2°,+5°),即由法矢(0,0,1)T到法矢(0.087 156,-0.034 77,0.995 588)T时,各足偏移量Δxpim,Δypim和各足驱动量Δli如表 1所示.由算例可知,调姿时外足相对于内足调整量较大,故设计了外足升降±110 mm,内足升降±80 mm.
| 位置 | xSib/mm | ySib/mm | zSib/mm | ΔxSpim/mm | ΔxSpim/mm | Δli/mm |
| S1 | 0 | 0 | 0 | 0 | 0 | 0 |
| S2 | -260 | 0 | 0 | 0.989 4 | 0 | -22.660 5 |
| S3 | -565 | 0 | -20 | 3.892 1 | -0.698 0 | -49.154 8 |
| S4 | -565 | 462 | -20 | 5.297 3 | -0.979 4 | -65.217 |
| S5 | -260 | 462 | 0 | 2.394 6 | -0.281 4 | -38.722 7 |
| S6 | 0 | 462 | 0 | 1.405 3 | -0.281 4 | -16.062 2 |
| S7 | 305 | 462 | -20 | 1.986 7 | -0.979 4 | 10.608 5 |
| S8 | 305 | 0 | -20 | 0.581 4 | -0.698 0 | 26.670 7 |
根据表 1的机构实际尺寸、初始坐标,运用Matlab求解绘出了A角在(-2°,2°),B角在(-5°,5°)范围内调姿时,机构各足偏移量Δxpim,Δypim的落点分布图,并找出最远边际点,求出其偏移距离rmax.对各足进行求解,得出各足中偏移距离rmax最大的是足4,图 6为足4的偏移落点分布图,其最大偏移距离rmax=5.387 1 mm.
 |
| 图 6 足4Δxpim,Δypim偏移量Fig. 6 Δxpim,Δypim offset of foot 4 |
第1节中得出双偏心变胞源机构自由调整区域是半径为2r的圆形区域,根据图 6的Matlab分析,双偏心变胞源机构的偏心量r值定为5 mm时,可满足本机构的应用需求. 3.3 仿真分析
为验证本文中的基于各足驱动的调姿运动算法,将机构模型导入ADAMS中,参见图 5添加运动副及约束关系,根据表 1算例确定各足初始位置,定义八足升降副为驱动副.运用驱动平稳且具特定频响特性的STEP(0,0,1,Δli)函数作为各足驱动函数(表示0~1 s,驱动了Δli,其值为表 1算例中各足驱动量),进行虚拟样机[22]仿真,如图 7所示.
 |
| 图 7 自主移动制孔机构虚拟样机Fig. 7 Virtual prototype of autonomous mobile drilling mechanism |
仿真中机构位姿摆角随时间变化如图 8所示,测得框身A角摆动2°,B角摆动4.999°,与算例相符.双偏心机构在仿真中运行平稳,各足x,y方向偏移量仿真结果如表 2所示,与表 1理论值进行了误差对比,结果与算例相符.
 |
| 图 8 机构摆角仿真结果Fig. 8 The simulation result of mechanism pose angle |
| 位置 | x向仿真 偏移量 | y向仿真 偏移量 | 仿真与算例的 x向偏移量 差值 | 仿真与算例的 y向偏移量 差值 |
| S1 | 0 | 0 | 0 | 0 |
| S2 | 0.989 4 | 0 | 0 | 0 |
| S3 | 3.891 5 | -0.698 2 | -0.000 6 | -0.000 2 |
| S4 | 5.302 2 | -0.980 1 | 0.004 9 | -0.000 7 |
| S5 | 2.394 9 | -0.281 4 | 0.000 3 | 0 |
| S6 | 1.405 5 | -0.281 5 | 0.000 2 | -0.000 1 |
| S7 | 1.986 8 | -0.979 6 | 0.000 1 | -0.000 2 |
| S8 | 0.581 5 | -0.697 8 | 0.000 1 | 0.000 2 |
根据虚拟样机仿真结果,验证了本文提出的运动学算法适用于本机构调姿运动,且双偏心变胞源机构在a1状态能很好地适应调姿中各足x,y方向的偏移量,平台调姿运行平稳. 3.4 样机实现
由本文设计方案研制的具有变胞功能的自主移动制孔机构,共有12个电机(不包括制孔主轴)实现机构的行走、调姿制孔功能,如图 9所示.样机选用丝杆导程均为5 mm,电机额定转速均为3 000 r/min,钻孔进给速率4 mm/s,机构完成行走-调姿制孔各阶段的动作流程与行程和耗时如表 3所示.由于每行走一次后,机构将钻一个区域的孔(一般20个以上),并且一般制孔厚度在4~8 mm以内,经计算与实验,机构每分钟至少可钻孔6个,行走效率上满足工程上每分钟钻6~7个孔的要求.
 |
| 图 9 自主移动制孔机构实物样机Fig. 9 Physical prototype of autonomous mobile drilling mechanism |
| 功能阶段 | 动作流程与行程 | 耗时/s |
| 行走阶段 | 外足抬升50 mm→外框x行走300 mm→外足下降50 mm→吸附2 s→内足抬升50 mm→内框x行走300 mm→内足下降50 mm→吸附2 s | 7.2 |
| 调姿制孔 | 调姿行程<65 mm→刀具偏移补偿(总行程<30 mm)→空载进刀25 mm→钻削进刀15 mm→停顿0.5 s→钻削退刀15 mm→空载退刀25 mm→换孔位行程30 mm | 8.7 |
按照GB/T1958—2004产品几何量技术规范(GPS)形状和位置公差检测规定,采用激光跟踪仪检测机构运动精度,测试结果如下:机构调姿精度小于0.2°,满足工程上不大于0.5°的要求. 4 结 论
本文提出了一种双偏心变胞源机构,并基于此设计了一种具有变胞功能的真空吸附式自主移动制孔机构,能实现飞机蒙皮表面行走和法向调姿制孔.在完成运动学求解的基础上,给出了用于调姿控制实现的各足输入驱动量和刀具点补偿量的计算公式,以便控制系统对法向制孔进行精确调整.
根据实际装配制孔需求,设计了一套制孔原型系统,按照机构的尺寸和各足的偏移量,确定了双偏心变胞源机构的偏心量r=5 mm,从而完成了实际样机的设计,并用虚拟样机仿真验证了运动学算法与双偏心变胞源机构.该机构满足装配制孔调姿时摆角A在±2°,B在±5°的工程要求.
通过完成的实物样机试验表明,本文设计的自主移动制孔机构的精度误差小于0.2°,满足飞机装配自动化制孔工程上不大于0.5°的要求和每分钟6~7个孔的制孔效率要求.
| [1] | DeVlieg R, Sitton K,Feikert E,et al.ONCE(one sided cell end effector) robotic drilling system,2002-01-2626[R].USA:SAE,2002. |
| Click to display the text | |
| [2] | Atkinson J, Hartmann J,Jones S,et al.Robotic drilling system for 737 aileron,2007-01-3821[R].USA:SAE,2007 |
| Click to display the text | |
| [3] | Branko S. Assembly techniques for space vehicles,2000-01-3028[R].USA:SAE,2001. |
| Click to display the text | |
| [4] | 许国康. 大型飞机自动化装配技术[J].航空学报,2008,29(3): 734-740. Xu G K.Automatic assembly technology for large aircraft[J].Acta Aeronautica et Astronautica Sinica,2008,29(3):734-740(in Chinese). |
| Click to display the text | Cited By in Cnki (93) | |
| [5] | Marguet B, Cibiel C,De Francisco Ó.Crawler robots for drilling and fastener installation: an innovative breakthrough in aerospace automation,2008-01-2292[R].USA:SAE,2008 |
| Click to display the text | |
| [6] | 刘冬,赵现朝, 齐臣坤.行走·定位一体化飞机制孔六足机器人研究[J].机械设计与研究,2012,28(6):53-55. Liu D,Zhao X Z,Qi C K.Research on walking-positioning integrated hexapod robot for drilling aircraft component[J].Machine Design and Research,2012,28(6):53-55(in Chinese). |
| Cited By in Cnki | |
| [7] | 王启申,袁培江, 王田苗,等.航空制孔末端执行器中调姿机构的设计与实验[J].北京航空航天大学学报,2014,40(7):988-993. Wang Q S,Yuan P J,Wang T M,et al.Design and experiment of an adjusting mechanism in aviation drilling end effector[J].Journal of Beijing University of Aeronautics and Astronautics,2014,40(7):988-993(in Chinese). |
| Cited By in Cnki | |
| [8] | 王珉,陈文亮, 张得礼,等.飞机轻型自动化制孔系统及关键技术研究[J].航空制造技术,2012(19):40-43.Wang M,Chen W L,Zhang D L,et al.Light-weight automatic drilling system and key technology for aircraft[J].Aeronautical Manufacturing Technology,2012(19):40-43(in Chinese). |
| Cited By in Cnki (9) | |
| [9] | Dai J S, Rees J J.Mobility in metamorphic mechanisms of foldable/erectable kinds[J].Transactions of ASME,Journal of Mechanical Design,1999,121(3):375-382. |
| Click to display the text | |
| [10] | Dai J S, Zhang Q X.Metamorphic mechanisms and their configuration models[J].Chinese Journal of Mechanical Engineering,2000,13(3):212-218. |
| Click to display the text | |
| [11] | Li D L, Dai J S,Sun H.Configuration based synthesis of a Carton-like metamorphic mechanism of foldable and erectable[J].Journal of Engineering Design,2005,16(4):375-386. |
| [12] | 王德伦,戴建生. 变胞机构及其综合的理论基础[J].机械工程学报,2007,43(8):32-42. Wand D L,Dai J S.Theoretical foundation of metamorphic mechanism and its synthesis[J].Chinese Journal of Mechanical Engineering,2007,43(8):32-42(in Chinese). |
| Cited By in Cnki (73) | |
| [13] | Dai J S, Rees J J.Matrix representation of topological changes in metamorphic mechanisms[J].ASME Transaction:Journal of Mechanical Design,2005,127(4):675-682. |
| Click to display the text | |
| [14] | 刘川禾. 变拓扑机构结构组成理论[J].机械工程学报,2012,48(19):52-58. Liu C H.Structure composition theory of variable topology mechanisms[J].Journal of Mechanical Engineering,2012,48(19): 52-58(in Chinese). |
| Cited By in Cnki | |
| [15] | Dai J S, Wang D L.Geometric analysis and synthesis of the metamorphic robotic hand[J].Journal of Mechanical Design,2007,129(11):1191-1196. |
| Click to display the text | |
| [16] | Wang Z Y, Ding X L,Xie Y W.Conceptual design of a novel robotics system for planetary exploration[C]//Proceedings of the 6th World Congress on Intelligent Control and Automation.Piscataway,NJ:IEEE Computer Society,2006:8962-8965. |
| Click to display the text | |
| [17] | 杨廷力,刘安心, 罗玉峰,等.机器人机构拓扑结构设计[M].北京:科学出版社,2012:138-150. Yang T L,Liu A X,Luo Y F.Theory and application of robot mechanism topology[M].Beijing:Beijing Science Press,2012:138-150(in Chinese). |
| [18] | Zhang L P, Wang D L,Dai J S.Biological modeling and evolution based synthesis of metamorphic mechanisms[J].Journal of Mechanical Design,2008,130(7):07230301-07230310. |
| Click to display the text | |
| [19] | Tian W, Zhou W X,Zhou W.Auto-normalization algorithm for robotic precision drilling system in aircraft component assembly[J].Chinese Journal of Aeronautics,2013,26(2):495-500. |
| Click to display the text | |
| [20] | 王珉,薛少丁, 陈文亮,等.面向飞机自动化装配的单向压紧制孔毛刺控制技术[J].航空制造技术,2011(9):26-29. Wang M,Xue S D,Chen W L,et al.One-side pressed burrless drilling technology for aircraft automatic assembly[J].Aeronautical Manufacturing Technology,2011(9):26-29(in Chinese). |
| Cited By in Cnki (11) | |
| [21] | 黄真,赵勇生, 赵铁石.高等空间机构学[M].北京:高等教育出版社,2006:118-127. Huang Z,Zhao Y S,Zhao T S.Advanced spatial mechanism[M].Beijing:Higher Education Press,2006:118-127(in Chinese). |
| [22] | 谢志江,孙小勇, 孙海生,等.低速风洞动态试验的高速并联机构设计及动力学分析[J].航空学报,2013,34(3):487-494. Xie Z J,Sun X Y,Sun H S,et al.Mechanism design and dynamics analysis of high speed parallel robot for dynamic test in low speed wind tunnel[J].Acta Aeronautica et Astronautica Sinica,2013,34(3):487-494(in Chinese). |
| Cited By in Cnki |