



卫星系统由许多元部件组成,结构复杂,加之轨道环境可能存在的不确定因素的影响,很难保证在轨运行期间不发生任何故障.卫星系统故障发生的形式多样,而且系统内各组成部分功能相关联,故障传播可能引起链式反应,一旦不能及时干预,将导致严重后果[1].健康管理技术是减轻与消除故障影响,保障卫星系统安全运行的有力工具.健康评估立足于系统当前健康情况对其进行评判,能够引导健康管理系统实现科学有效的健康管理决策并实施之.健康评估技术关系航天器健康管理的成败,是提升航天器系统安全性与可靠性、降低有效生命周期运行成本,进而保障型号任务得以顺利完成的有力工具[2,3].
作为实现航天器健康管理的关键技术,航天器健康评估技术受到国内外研究人员的广泛关注,已开展了相关研究.文献[4]面向航天系统健康管理的需求提出了一种传感器选择架构,利用健康相关信息与传感器组件评价算法进行迭代选择,实现传感器的优选.文献[5]采用嵌入式非线性超声波检测卫星螺栓连接部的完整性,将声弹性法与调制法相结合,实现对卫星接头结构的健康监测.文献[6]给出了一种基于数据驱动技术的自动态势评估算法,根据空间天气的原始数据和健康状态的遥测数据,实现对地球低轨道卫星的异常检测与评估.文献[7]给出了一种多摄像机系统的设计方案,利用多个微型摄像机采集遥测图像,实现航天器的异常感知与健康评估.文献[8]针对健康评估需求提出了五要素建模理论,给出了以变化证据信息为导向、基于贝叶斯球和交叉熵测度的变模型快速推理算法,实现综合运载器的健康评估.文献[9]使用模糊综合评价算法实现了对航天器组件、分系统以及系统级健康状况的在线评估.这些研究成果的取得有力推动了航天器健康评估技术的发展,对航天器健康管理水平的提高也有一定的促进作用.但是由于参数测量难以覆盖系统的所有环节,以及评估的指标体系尚不完善,现有技术还难以满足面向空间自主的航天器健康管理的要求.有必要在现有研究的基础上结合智能化方法的优势,进一步开展健康评估技术研究,以应对航天器在轨自主化运行所带来的技术挑战.
本文根据模糊综合评价原理,针对卫星姿态控制系统在轨运行期间的健康评估技术特点,提出一种结构分解与加权集成的卫星姿态控制系统实时健康评估方法.与常规模糊综合评价法所不同的是,此方法充分考虑了卫星在轨运行期间之健康状况的动态变化,设计了根据各部分健康状况隶属度测算流变权值并进行加权聚合以形成总体评价结果的新算法,从而有效克服了常规方法中以固定权值求出的综合健康指标与局部健康水平下降时的整体健康状况极不相符的严重弊端,完全适合于在轨实时健康评估的工程背景与技术需求.在健康评估的策略上,采用多级模糊综合评价架构,按照功能特性,将卫星姿态控制系统划分为姿态测量、控制器与执行机构3部分.在确定各单元部件健康的基础上,对各部分的(局部)健康进行模糊综合评价.根据各部分的健康信息,结合其对系统健康的影响情况,采用变权综合原理计算影响权重,进行模糊合成运算,实现对系统总体健康的在轨实时评估.
1 局部健康的模糊综合评估
卫星姿态控制系统由姿态测量、控制器和执行机构3部分组成.根据系统构型的不同,各部分又分别由多个单元部件组合而成[10].通过性能表现确定各个单元部件的健康度,结合单元部件与各部分的功能关联,可以实现系统各部分(局部)健康度的评估.
1.1 单元部件的健康确定
卫星姿态测量部分主要由多个姿态敏感器,如陀螺、星敏感器、红外地平仪等组成[11].根据姿态动力学构建卫星姿态控制系统的功能名义模型,该模型与实际姿态控制系统的工作与环境参数相同,以实际系统控制力矩量作为输入,推算出名义姿态角、姿态角速度等信息.将各姿态敏感器实际测量值与其名义值进行比较,根据偏差值与所设置的健康评估阈值的关系,按照各敏感器对于“健康”、“亚健康”与“非健康”的隶属度函数μJc(ec(k)),μYJc(ec(k)),μNJc(ec(k)),分别如式(1)~式(3)所示,确定该敏感器对于各健康等级的隶属度.

 |
| 图 1 姿态敏感器健康等级隶属度函数Fig. 1 Health level membership functions of sensors |
卫星姿态控制器主要指星载计算机中负责卫星姿态控制的软、硬件部分.通常,星载计算机都具有专门的软、硬件故障检测、隔离、容错及备份切换等功能设计,具有较高的可靠性[10].将姿态控制器划分为姿态信息接收、控制指令输出、姿态信息处理与控制指令生成等功能单元,利用检测算法,计算各功能单元该时刻发生错误的数据占其处理数据的比例,即错误率;根据错误率与所设置的健康评估阈值的关系,按照该单元对于健康、亚健康与非健康的各隶属度函数μJkz(ekz(k)),μYJkz(ekz(k)),μNJkz(ekz(k)),如式(4)~式(6)所示,分别确定对各健康等级的隶属度.
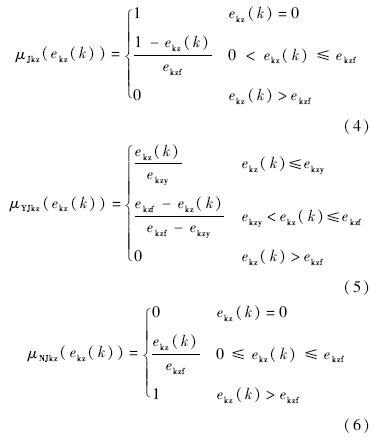
 为k时刻该单元出现错误的数据量,xkz(k)为其所处理的数据量为k时刻错误率;ekzy为控制器亚健康阈值;ekzf为控制器单元误差容忍上限值.控制器各单元健康等级隶属度函数如图 2所示.
为k时刻该单元出现错误的数据量,xkz(k)为其所处理的数据量为k时刻错误率;ekzy为控制器亚健康阈值;ekzf为控制器单元误差容忍上限值.控制器各单元健康等级隶属度函数如图 2所示.
 |
| 图 2 控制器各单元健康等级隶属度函数Fig. 2 Health level membership functions of controllers |
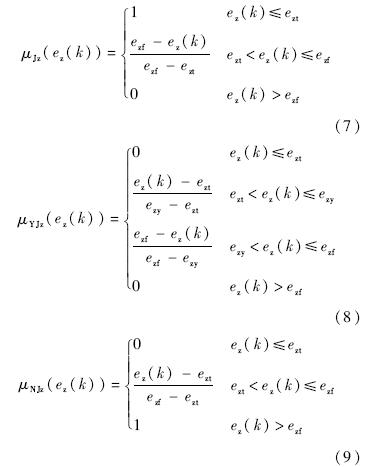
卫星姿态控制系统的执行机构主要包括飞轮等部件[11].这些部件根据控制器指令,输出相应力矩,从而实现姿态控制.根据控制器所要求的控制力矩与实际输出控制力矩的偏差,结合所设置的健康评估阈值,按照该部件对于健康、亚健康与非健康的隶属度函数μJz(ez(k)),μYJz(ez(k)),μNJz(ez(k)),如式(7)~式(9)所示,分别确定执行部件对各健康等级的隶属度.
 |
| 图 3 执行机构各部件健康等级隶属度函数Fig. 3 Health level membership functions of actuators |
1.2 局部健康的模糊综合评估方案
采用模糊综合评价法[9,12,13]评估卫星姿态控制系统各部分的健康度,以单元部件作为其所属部分健康的影响因素,根据各单元部件的健康度值作为权重值;各部分健康评价分为健康、亚健康与非健康3个等级;按照式(1)~式(9)的单元部件对各健康等级隶属度函数,以各部件的健康隶属度构建模糊关系矩阵;通过影响因素权重集与评价矩阵的合成运算得到评价结果集,即获得了各部分的健康等级及其健康度值,从而实现了对各部分健康的模糊评估.
以单元部件构建健康影响因素集:

构建健康影响因素初始权重集:

系统各部分健康的模糊评价集为

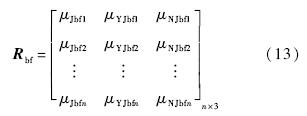
局部健康评价矩阵(模糊关系矩阵)为
当单元部件间相互独立且无特殊关联关系时,影响权值为常值.若存在功能关联时,低权重因素的作用往往变得显著.有必要采用变权方法克服常权评估的局限,对系统健康进行准确合理的动态评估[14].变权程度与所选用的均衡函数密切相关,对健康度的变权选用惩罚型均衡函数,对于亚健康度、非健康度的变权选用激励型均衡函数,所选函数的变权公式如下[15]:

通过健康因素权重集与局部健康评价向量的合成运算得到模糊综合评价结果集(局部健康信息)Bbf,有

1.3 局部健康的模糊综合评估算法
根据局部健康评估方案,给出姿态控制系统各部分健康的模糊综合评估算法.
算法1 姿态测量部分健康的模糊综合评价算法.
输入:ecp(k) 输出:Bc(k) 初始化:αc,βc,γc,A(0)c,ectp,ecyp,ecfp根据式(1)~式(3)分别构建rJc(k),rYJc(k),rNJc(k);
根据式(14)~式(16)分别构建AJc,AYJc,ANJc;
通过合成运算有
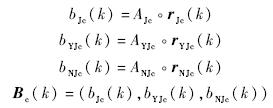
以各敏感器的实际测量值与名义测量值的偏差绝对值ecp(k)为输入,根据各敏感器对姿态测量部分健康的影响构建初始权重集A(0)c,设置健康检测阈值ectp、亚健康阈值ecyp、误差容忍上限值ecfp,令αc,βc和γc为变权系数,分别通过各敏感器健康影响变权权重集AJc,AYJc,ANJc与对应健康评价向量rJc(k),rYJc(k),rNJc(k)的模糊合成运算得到姿态测量部分的健康信息Bc(k).其中,p=1,2,…,n1,n1为敏感器数目;A(0)c∈R1×n1;Bc∈R1×3.
算法2 姿态控制器部分健康的模糊综合评价算法.
输入:ekzq(k) 输出:Bkz(k) 初始化:αkz,βkz,γkz,A(0)kz,ekzyq,ekzfq根据式(4)~式(6)构建rJkz(k),rYJkz(k),rNJkz(k);
根据式(14)~式(16)分别构建AJkz,AYJkz,ANJkz;
合成运算:

以各功能单元所处理数据的错误率ekzq(k)为输入,根据各单元对姿态控制器部分健康的影响构建权重集A(0)kz,分别设定各单元的亚健康阈值ekzyq、误差容忍上限值ekzfq,令αkz,βkz和γkz为变权系数,分别通过各单元健康影响变权权重集AJkz,AYJkz,ANJkz与对应健康评价向量rJkz(k),rYJkz(k),rNJkz(k)的模糊合成运算得到姿态控制器部分的健康信息Bkz(k).其中,q=1,2,…,n2,n2为功能单元数目;A(0)kz∈R1×n2;Bkz∈R1×3.
算法3 执行机构部分健康的模糊综合评价算法.
输入:ezs(k) 输出:Bz(k) 初始化:αz,βz,γz,A(0)z,ezts,ezys,ezfs根据式(7)~式(9)构建rJz(k),rYJz(k),rNJz(k);
根据式(14)~式(16)分别构建AJz,AYJz,ANJz;
合成运算:
以各执行器输出力矩的实际值与期望值的绝对差值ezs(k)为输入,根据各执行器对执行机构部分健康的影响构建权重集A(0)z,分别设定各执行器的健康检测阈值ezts、亚健康阈值ezys、误差容忍上限值ezfs,令αz,βz和γz为变权系数,分别通过各执行器健康影响变权权重集AJz,AYJz,ANJz与对应健康评价向量rJz(k),rYJz(k),rNJz(k)的模糊合成运算得到执行机构部分的健康信息Bz(k).其中,s=1,2,…,n3,n3为执行器数目;A(0)z∈R1×n3;Bz∈R1×3.
2 系统整体健康的综合评估
卫星姿态控制系统是由姿态测量、控制器、执行机构3部分组成的闭环系统.对于闭环控制系统而言,由于反馈的存在,通常会导致故障(尤其是早期故障与幅值较小故障)更难被检测到,而且可能使得故障在系统内传播造成多处故障[16].这不但增加了故障分离的难度,同时也增加了对系统实施准确有效健康评估的挑战性.
本文以多级模糊综合评价为基础,提出卫星姿态控制系统的在轨实时健康评估方法.根据系统功能的不同,将卫星姿态控制系统划分为姿态测量、控制器与执行机构3部分.根据各部分单元部件的功能情况与所设置健康隶属度函数确定单元部件对各健康等级的隶属度.以所确定的单元部件健康信息为基础,采用变权综合原理确定单元部件对其所属部分健康的影响权重,对该部分的健康情况进行模糊综合评价.进而按照变权综合原理计算各部分对系统健康的影响权重,结合系统各部分对健康、亚健康、非健康3个健康等级的隶属度,进行模糊关系合成运算,获得系统总体健康的综合评价.
算法4 卫星姿态控制系统整体健康的模糊综合评价算法.
输入:Bc(k),Bkz(k),Bz(k) 输出:Bxt(k) 初始化:αxt,βxt,γxt,A(0)xt以各部分健康评估结果构建系统健康评价矩阵,则有
根据式(14)~式(16)分别构建AJxt,AYJxt,ANJxt;
合成运算:

以姿态控制系统3个部分的健康评估结果Bc(k),Bkz(k)和Bz(k)为输入确定健康、亚健康与非健康3个等级的系统总体健康向量rJxt(k),rYJxt(k),rNJxt(k);以各部分对系统总体健康的影响设定初始影响权值集A(0)xt,令AJxt,AYJxt,ANJxt为系统健康影响变权权重集;Bxt(k)为输出,令bJxt(k),bYJxt(k),bNJxt(k)分别为卫星姿态控制系统的健康度值、亚健康度值、非健康度值.
3 仿真实验结果与分析
为验证本文所提出健康评估算法的性能进行数字仿真实验.三轴稳定卫星姿态控制系统采用3个星敏感器测量姿态角信息;以3个陀螺仪测量姿态角速度;姿态控制力矩由3个正装的反作用飞轮提供.卫星姿态动力学方程如下[11]:
以文献[17]中卫星参数进行仿真实验.卫星的转动惯量矩阵为diag(80,90,70)kg·m2;反作用飞轮的最大输出力矩为uc=0.2N·m;空间干扰力矩选为

设置滚动轴星敏感器在第80s发生输出卡死故障,到第120s又恢复正常.如图 4~图 6分别为此情况下所测得的姿态角、飞轮提供的控制力矩、姿态控制系统对各健康等级(健康度、亚健康度与非健康度)的隶属度.
 |
| 图 4 星敏感器故障时所测卫星姿态角Fig. 4 Attitude angles measured under star sensor fault condition |
 |
| 图 5 星敏感器故障时反作用飞轮的控制力矩Fig. 5 Control torques of reaction flywheels under star sensor fault condition |
 |
| 图 6 星敏感器故障时系统对各健康等级的隶属度Fig. 6 Health level memberships of attitude control system under star sensor fault condition |
设置俯仰轴反作用飞轮发生输出偏差故障,故障力矩uf在第50,80,110,140,170s后分别为0.01,0.02,0.03,0.04,0.05N·m.图 7~图 9分别为此情况下所测得的姿态角、飞轮提供的控制力矩、姿态控制系统对各健康等级的隶属度.
 |
| 图 7 飞轮故障时星敏感器所测卫星姿态角Fig. 7 Attitude angles measured by star sensors under flywheel fault |
 |
| 图 8 反作用飞轮故障时所提供的控制力矩Fig. 8 Control torques under reaction flywheel fault condition |
 |
| 图 9 飞轮故障时系统对各健康等级的隶属度Fig. 9 Health level memberships of attitude control system under flywheel fault condition |
通过以上仿真实验可知,本文所提出的健康评估方法在卫星姿态控制系统正常与发生故障情况下均能有效实现对其健康度的实时评估.采用本算法获得的健康评估结果与所设置仿真实验情况相一致,这表明了本文方法的准确性.
4 结 论
1) 提出一种基于多级模糊综合评价架构的卫星姿态控制系统在轨实时健康评估方法,能够实现对单元部件、组成部分乃至系统整体健康水平的在轨实时评估.
2) 根据系统各部分的健康信息计算健康影响的流变权值进行聚合加权运算以形成总体评价结果,能够反映局部健康水平下降时整体健康指标的动态变化.
3) 仿真实验结果表明,在系统正常与发生故障情况下,本文方法均能有效实现对卫星姿态控制系统健康度的实时评估,适合于在轨实时健康评估的工程背景与技术需求.
| [1] | 邢琰,吴宏鑫,王晓磊,等.航天器故障诊断与容错控制技术综述[J].宇航学报,2003,24(3):221-226 Xing Yan,Wu Hongxin,Wang Xiaolei,et al.Survey of fault diagnosis and fault-tolerance control technology for spacecraft[J].Journal of Astronautics,2003,24(3):221-226(in Chinese) |
| Cited By in Cnki (76) | Click to display the text | |
| [2] | Esperon M M,John P,Jennions I K.A review of integrated vehicle health management tools for legacy platforms:challenges and opportunities[J].Progress in Aerospace Sciences,2013,56:19-34 |
| Click to display the text | |
| [3] | 毛德耀,周栋,文培乾,等.基于PHM的军机备件配置机制[J].北京航空航天大学学报,2011,37(9):1160-1164 Mao Deyao,Zhou Dong,Wen Peiqian,et al.Allocation mechanism of military aircraft spares based on PHM[J].Journal of Beijing University of Aeronautics and Astronautics,2011,37(9):1160-1164(in Chinese) |
| Cited By in Cnki | |
| [4] | Maul W A,Kopasakis G,Santi L M,et al.Sensor selection and optimization for health assessment of aerospace systems[J].Journal of Aerospace Computing,Information,and Communication,2008,5(1):16-24 |
| Click to display the text | |
| [5] | Zagrai A,Doyle D,Arritt B.Embedded nonlinear ultrasonics for structural health monitoring of satellite joints[J].Proceedings of the Society of Photo-optical Instrumentation Engineers,2008,6935:5 |
| Click to display the text | |
| [6] | Haith G,Bowman C.Toward an automated situation assessment for abnormal behavior of satellites in low earth orbit (LEO)[R].AIAA-2010-3335,2010 |
| [7] | Nye T W.Spacecraft health and forensics from video telemetry[R].AIAA-2013-5532,2013 |
| [8] | 代京,张平,李行善,等.综合运载器健康管理健康评估技术研究[J].宇航学报,2009,30(4):1711-1721 Dai Jing,Zhang Ping,Li Xingshan,et al.Research on health assessment of integrated vehicle health management[J].Journal of Astronautics,2009,30(4):1711-1721(in Chinese) |
| Cited By in Cnki (15) | |
| [9] | 刘国良,王元道,周宝林,等.集成系统健康管理中健康评估算法研究[J].哈尔滨工业大学学报,2009,41(3):15-17 Liu Guoliang,Wang Yuandao,Zhou Baolin,et al.Health detection algorithm for integrated system health management[J].Journal of Harbin Institute of Technology,2009,41(3):15-17(in Chinese) |
| Cited By in Cnki (7) | |
| [10] | 徐祥福.卫星工程概论:上册[M].北京:中国宇航出版社,2003:331-358 Xu Xiangfu.Introduction to satellite engineering:First volume[M].Beijing:Astronautic Publishing House,2003:331-358(in Chinese) |
| [11] | 屠善澄.卫星姿态动力学与控制:上册[M].北京:宇航出版社,1999:1-42 Tu Shancheng.Satellite attitude dynamics and control:First volume[M].Beijing:Astronautic Publishing House,1999:1-42(in Chinese) |
| [12] | 戴城国,王晓红,张新,等.基于模糊综合评判的电液伺服阀FMECA[J].北京航空航天大学学报,2011,37(12):1575-1578 Dai Chengguo,Wang Xiaohong,Zhang Xin,et al.Fuzzy comprehensive evaluation in FMECA of electro-hydraulic servo valve[J].Journal of Beijing University of Aeronautics and Astronautics,2011,37(12):1575-1578(in Chinese) |
| Cited By in Cnki (7) | |
| [13] | 潘波,姜同敏.基于故障树的飞机结构腐蚀损伤模糊综合评判[J].北京航空航天大学学报,2012,38(1):39-42 Pan Bo,Jiang Tongmin.Fuzzy comprehensive evaluation of corrosion damage of aircraft structures based on fault tree[J].Journal of Beijing University of Aeronautics and Astronautics,2012,38(1):39-42(in Chinese) |
| Cited By in Cnki (8) | |
| [14] | 李鑫,刘莹莹,李赣华,等.基于模糊变权原理的卫星健康评估方法[J].系统工程与电子技术,2014,36(3):476-480 Li Xin,Liu Yingying,Li Ganhua,et al.Assessment of satellite health state based on fuzzy variable weight theory[J].Systems Engineering and Electronics,2014,36(3):476-480(in Chinese) |
| Cited By in Cnki | |
| [15] | 李月秋.变权综合理论与多目标决策[D].昆明:昆明理工大学,2008 Li Yueqiu.Variable weights synthesis theory and multi-objective decision-making[D].Kunming:Kunming University of Science and Technology,2008(in Chinese) |
| Cited By in Cnki (4) | |
| [16] | 周东华,刘洋,何潇.闭环系统故障诊断技术综述[J].自动化学报,2013,39(11):1933-1943 Zhou Donghua,Liu Yang,He Xiao.Review on fault diagnosis techniques for closed-loop systems[J].Acta Automatica Sinica,2013,39(11):1933-1943(in Chinese) |
| Cited By in Cnki (7) | |
| [17] | 栾家辉.故障重构技术在卫星姿控系统故障诊断中的应用研究[D].哈尔滨:哈尔滨工业大学,2006 Luan Jiahui.Fault reconstruction technology and its application in satellite attitude control system fault diagnosis[D].Harbin:Harbin Institute of Technology,2006(in Chinese) |
| Cited By in Cnki (9) |