


多机协同制导是超视距协同作战的关键技术之一.当正在对导弹进行引导的飞机受到威胁或需要执行其他任务时,需要将本机对导弹的制导权移交给其他飞机,实现多机协同制导[1,2].
目前,国外对多机协同制导的研究比较少见[3,4,5,6,7],国内关于多机协同制导的研究正在逐渐深入[1,2,8,9,10,11].文献[8]提出了双机协同制导的概念,给出了双机协同制导的过程描述,为协同制导提供了理论基础,但其未对多机编队协同制导问题进行展开.文献[1]提出用制导优势来表征编队内其他飞机对导弹协同制导的能力,给出了制导权移交决策模型,但在建模中未考虑己方飞机与导弹的照射关系.文献[2]构建了我机对目标机制导优先权模型以及我机对空空导弹制导优先权模型,建立了空空导弹制导权移交的任务分配模型,但未考虑己方雷达的探测角度等约束条件.
本文对多机协同制导优势进行了建模分析,并建立了协同制导任务分配模型. 1 制导优势模型 1.1 己方飞机对导弹的态势优势
飞机的指令发射吊舱的头部和尾部都装有相同的天线,导弹的收/发天线则一般安装在导弹尾部.飞机与导弹之间通信可分为尾部照射和头部照射两种,分别如图 1a和图 1b所示[9].
 |
| 图 1 己方飞机对导弹的几何态势 Fig. 1 Situation of our aircraft to missile |
飞机必须处于导弹的尾部天线工作的最大角度的范围内,构建导弹角度优势:
导弹必须处于飞机的指令天线的最大搜索角度的范围内,构建己方飞机角度优势:

 max为飞机的指令天线的最大搜索角度.
max为飞机的指令天线的最大搜索角度.当己方飞机和导弹同时处于对方天线工作时的最大角度之内时,它们之间才能进行联系,构建总的角度优势:

当飞机与导弹的距离不大于机载雷达对导弹的最大制导距离时,己方飞机与导弹之间才能进行联系[2],构建距离优势:
当己方飞机与导弹之间的角度和距离都满足己方飞机与导弹的约束时,它们之间才能进行联系,构建己方飞机对导弹的态势优势:

候选制导飞机与目标的态势如图 2所示.
 |
| 图 2 敌我双方态势图 Fig. 2 Situation of both sides |
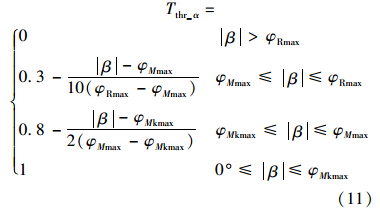
当方位角在己方飞机雷达的最大探测角范围内时,才认为飞机对目标具有探测能力,构建目标方位角优势:
现代机载雷达大多数都为脉冲多普勒雷达(PD雷达),其对迎头目标的探测能力最强;而其对处于正侧方一定角度范围内的目标却没有探测能力;对尾随的目标的探测能力远小于对迎头目标探测能力[12].构建目标进入角优势:

方位角优势和进入角优势具有一定的耦合性,构建总的探测角度优势:

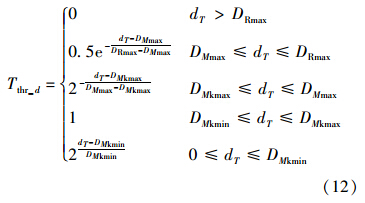
当己方飞机与目标的距离不大于己方机载雷达的最大探测距离时,才认为己方飞机对目标具有探测能力[13].构建探测距离优势:
由于距离和角度有一定的耦合性,构建己方飞机对目标的总的探测能力:

根据航向角及敌方飞机的角度性能,构建角度威胁因子[13]:
根据敌我双方距离及敌方飞机距离性能,构建距离威胁因子[13]:
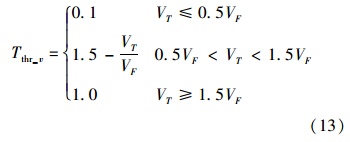
在空战中,飞机的速度越大,导弹攻击的成功概率就越高.根据敌我双方速度,构建速度威胁因子[1,13]:
由于距离和角度有一定的耦合性,构建己方飞机受到的敌方飞机威胁度:

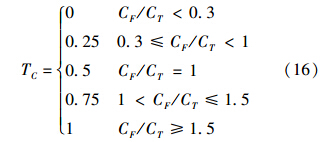
战斗机的空对空作战能力指数可表示为[14]

对敌我双方的空战能力指数进行归一化处理,构建空战效能优势函数[1,13]:
设我方飞机有M架,敌机有N架,我方第k架飞机所制导的导弹需要其他己方飞机进行制导,其正在制导的导弹个数为L,第l个导弹所攻击的目标为第nl架敌机.则可得到己方飞机与导弹的优势矩阵为Tgui、己方飞机对所有目标飞机的探测能力矩阵Tdet、敌方飞机对己方飞机的威胁度矩阵Tthr,对威胁度的每一行求平均值,得到敌方飞机对己方飞机的平均威胁度Tthr,求取威胁度的每一行最大值,得到敌方飞机对己方飞机的最大威胁度Tthr_max,最终威胁度为

多机协同制导任务分配就是使得总的协同制导优势最大,并满足各种约束条件:
多机协同制导分配模型是典型的非线性规划模型,对于这种复杂的多变量非线性优化问题,可采用遗传算法来求解[15].采用二进制编码,图 3为编码示意图,编码为长度是M×L的一维数组,数组从前到后均匀地分为M段,每段有L个元素,每一段都表示一架战机的任务分配情况,1表示将该导弹分配给该战机,0表示不分配.
 |
| 图 3 编码示意图 Fig. 3 Coding schematic |
本文中种群大小为80,采用式(18)计算适应值,采用轮盘赌选择法,交叉算子取0.75,变异算子取0.005,最大进化代数取100代. 3 仿真结果与分析
假设:己方由6架飞机F1,F2,…,F6组成空中编队,初始位置分别为(0,20),(4,16),(8,12),(12,8),(16,4),(20,0),单位为km,x方向速度为200m/s,y方向速度为200m/s;敌方由3架飞机T1,T2,T3组成空中编队,初始位置分别为(95,105),(100,100),(105,95),单位为km,x方向速度为-250m/s,y方向速度为-150m/s;敌我双方飞机处于同一水平高度匀速运动,双方的空战效能都为1;双方飞机性能参数如表 1和表 2所示.攻击方案为F3攻击目标T1,T2,F4攻击目标T3,Lm max为2,采用比例导引法对导弹进行制导,导弹速度为1000m/s,在第1060s时F3请求其他飞机对导弹进行制导,采样周期为0.1s.
| 编号 | 雷达搜索角/(°) | 最大离轴发射角/(°) | 雷达探测距离/km | 最大发射距离/km | 导弹天线圆锥角/(°) |
| F1 | 80 | 50 | 140 | 80 | 40 |
| F2 | 70 | 50 | 140 | 90 | 40 |
| F3 | 70 | 50 | 140 | 80 | 40 |
| F4 | 70 | 50 | 160 | 90 | 40 |
| F5 | 80 | 50 | 160 | 100 | 40 |
| F6 | 80 | 50 | 160 | 80 | 40 |
| 编号 | 雷达搜索角/(°) | 最大离轴发射角/(°) | 不可逃逸锥角/(°) | 雷达探测距离/km | 最大发射距离/km | 最大不可逃逸距离/km | 最小不可逃逸距离/km |
| T1 | 65 | 35 | 20 | 100 | 60 | 40 | 20 |
| T2 | 65 | 30 | 20 | 120 | 70 | 45 | 20 |
| T3 | 80 | 35 | 20 | 100 | 60 | 40 | 20 |
飞机对导弹总的制导优势如表 3所示,M31表示由F3发射并攻击T1的导弹,M32表示由F3发射并攻击T2的导弹.飞机对导弹的制导任务分配结果如表 4所示,F2对M31进行接替制导,F4对M32进行接替制导.图 4为遗传算法的种群进化曲线,可以看到最大适应值曲线很快收敛.
| 导弹编号 | 己方飞机编号 | |||||
| F1 | F2 | F3 | F4 | F5 | F6 | |
| M31 | 0.36032 | 0.37749 | 0.37542 | 0.36730 | 0.34607 | 0.06802 |
| M32 | 0.3528 | 0.3755 | 0.3880 | 0.3828 | 0.3608 | 0.0784 |
| 导弹编号 | 己方飞机编号 | |||||
| F1 | F2 | F3 | F4 | F5 | F6 | |
| M31 | 0 | 1 | 0 | 0 | 0 | 0 |
| M32 | 0 | 0 | 0 | 1 | 0 | 0 |
 |
| 图 4 种群进化曲线 Fig. 4 Evolution curves |
己方飞机对需要引导导弹的总的制导优势直方图如图 5所示,可以看出,选择了除请求制导的飞机以外的总的制导优势最大的飞机对需要接替制导的导弹进行制导,说明分配方案的正确性.
 |
| 图 5 制导优势直方图 Fig. 5 Histogram of guidance superiority |
整个仿真过程中的导弹及飞机的轨迹如图 6所示.己方飞机对导弹总的制导优势曲线如图 7和图 8所示,图中黑色竖线与总的制导优势曲线的交点的纵坐标表示该时刻飞机对导弹的总的制导优势.由图 7,对于导弹M31,F2的制导优势最大;由图 8,对于导弹M32,F4的制导优势最大,这也说明分配方案的正确性.
 |
| 图 6 飞机和导弹飞行轨迹及引导 Fig. 6 Trajectory and the guidance of aircrafts and missiles |
 |
| 图 7 关于M31的总的制导优势曲线 Fig. 7 Total guidance superiority curve of M31 |
 |
| 图 8 关于M32的总的制导优势曲线 Fig. 8 Total guidance superiority curve of M32 |
1) 建立了己方飞机对导弹的制导优势模型和协同制导任务分配模型.
2) 己方飞机能够根据本文的协同制导任务分配方法对导弹进行合理的制导任务分配.
| [1] | 肖冰松,方洋旺,胡诗国,等. 多机空战协同制导决策方法[J].系统工程与电子技术,2009,31(3):610-612 Xiao Bingsong,Fang Yangwang,Hu Shiguo,et al.Decision methods for cooperative guidance in multi-aircraft air warfare[J].Systems Engineering and Electronics,2009,31(3):610-612(in Chinese) |
| Cited By in Cnki (19) | |
| [2] | 费爱国,张陆游, 刘刚,等.基于粒子群拍卖混合算法的空空导弹制导权移交技术[J].宇航学报,2013,34(3):342-346 Fei Aiguo,Zhang Luyou,Liu Gang,et al.The technique for air-to-air missile guidance superiority handover based on particle swarm auction hybrid algorithm[J].Journal of Astronautics,2013,34(3):342-346(in Chinese) |
| Cited By in Cnki | |
| [3] | Shaferman V, Shima T.Cooperative multiple model adaptive guidance for an aircraft defending missile[J].Journal of Guidance,Control,and Dynamics,2010,33(6):1801-1813 |
| Click to display the text | |
| [4] | Ratnoo A, Shima T.Formation-flying guidance for cooperative radar deception[J].Journal of Guidance,Control,and Dynamics,2012,35(6):1730-1739 |
| Click to display the text | |
| [5] | Storms P P A, Grant T J.Agent coordination mechanisms for multi-national network enabled capabilities[C]//Proceedings of the 11th ICCRTS on Coalition Command and Control in the Networked Era.Cambridge,UK:CCRP,2006:1-20 |
| [6] | Young B W. A C2 system for future aerospace warfare[C]//Proceedings of the 2004 International Command and Control Research Technology Symposium.San Diego,CA:CCRP,2004: 1-21 |
| [7] | Young B W. Future integrated fire control[C]//Proceedings of the 10th International Command and Control Research and Technology Symposium.McLean,Virginia:CCRP,2005:1-21 |
| [8] | 高坚,佟明安. 双机编队协同制导的火控机理[J].火力与指挥控制,2009,34(12):38-40 Gao Jian,Tong Ming' an.Fire control principle on cooperative guidance with two-fighters team[J].Fire Control and Command Control,2009,34(12):38-40(in Chinese) |
| Cited By in Cnki (5) | |
| [9] | 刁兴华, 方洋旺,王鹏,等.对地攻击协同制导决策方法[J].电光与控制,2011,18(3):52-53 Diao Xinghua,Fang Yangwang,Wang Peng,et al.Cooperative guidance decision-making in air-to-ground attacking[J].Electronics Optics & Control,2011,18(3):52-53(in Chinese) |
| Cited By in Cnki (5) | |
| [10] | 乔良,王航宇, 石章松,等.编队协同防空制导交接仿真研究[J].指挥控制与仿真,2009,31(4):81-83 Qiao Liang,Wang Hangyu,Shi Zhangsong,et al.Smulation research for the guidance relaying zone of formation cooperative aerial defense[J].Command Control & Simulation,2009, 31(4): 81-83(in Chinese) |
| Cited By in Cnki (2) | |
| [11] | 余亮,邢昌风, 王航宇,等.编队协同防空作战中制导交接问题分析与建模[J].舰船电子工程,2008,28(4):47-49 Yu Liang,Xing Changfeng,Wang Hangyu,et al.Analysis and modeling for guidance handover in cooperative air defense of ship formation[J].Ship Electronic Engineering,2008,28(4):47-49(in Chinese) |
| Cited By in Cnki (14) | |
| [12] | 崔晓宝,李楠. 机载PD雷达对机动目标探测盲区计算模型研究[J].火控雷达技术,2008,37(3):36-40 Cui Xiaobao,Li Nan.Research on calculation models for detection blind zone of airborne PD radar against maneuvering targets[J].Fire Control Radar Technology,2008,37(3):36-40(in Chinese) |
| Cited By in Cnki (5) | |
| [13] | 肖冰松, 方洋旺,夏海宝,等.多机协同对空目标探测与攻击任务的最优分配[J].火力与指挥控制,2011,36(6): 1923 Xiao Bingsong,Fang Yangwang,Xia Haibao,et al.Optimal allocation of aerial target detection and attack in cooperative multi-fighter air combat[J].Fire Control & Command Control,2011,36(6):19-23(in Chinese) |
| Cited By in Cnki (1) | |
| [14] | 朱宝鎏,朱荣昌, 熊笑非.作战飞机效能评估[M].2版.北京:航空工业出版社,2006 Zhu Baoliu,Zhu Rongchang,Xiong Xiaofei.Fighter plane effectiveness assessment[M].2nd ed.Beijing:Aviation Industry Press,2006(in Chinese) |
| [15] | Shima T, Rasmussen S J,Sparks A G,et al.Multiple task assignments for cooperating uninhabited aerial vehicles using genetic algorithms[J].Computers & Operations Research,2006,33(11):3252-3269 |
| Click to display the text |