


2. 北京航空航天大学 航空科学与工程学院, 北京 100191
2. School of Aeronautical Science and Engineering, Beijing University of Aeronautics and Astronautics, Beijing 100191, China
切换系统是由若干微分/差分动态系统和描述系统间切换规律的切换信号所构成的系统.作为一类重要的混杂系统,切换系统近年来受到控制理论界的广泛关注[1,2].而切换现象在实际物理过程中的普遍存在,则推动了切换系统理论在工程领域的应用[3,4,5,6].
虽然切换系统的稳定性分析与镇定控制方面的研究工作已较为成熟[1],且针对切换系统的L2增益分析与H∞控制问题的研究亦频繁见诸报道[7,8,9].然而现有研究存在如下局限:①假设子系统(模式)间的切换是即时的.该假设忽略了系统模式的过渡过程,对某些实际物理过程而言,其模型描述过于简化.②以加权L2增益作为评价系统扰动抑制水平的指标.与L2增益相比,加权L2增益降低了对系统扰动抑制水平的要求,且物理意义有失直观.
为弥补以上不足,本文以常规L2增益为指标研究一类非理想切换系统的H∞切换控制问题,并通过变体飞行器的跟踪控制器设计实例验证了本文所提方法的有效性.与有关异步切换系统[10]的同类工作相比,本文的区别及贡献在于:①非理想切换概念强调系统模式切换过程的非即时性,而异步切换并未考虑这一特性;②采用常规L2增益作为评价切换系统扰动抑制能力的指标,而非加权L2增益;③将文献[10]离散时间分析框架下的结果平行推广至连续时间域. 1 问题描述
考虑如下非理想切换系统模型:
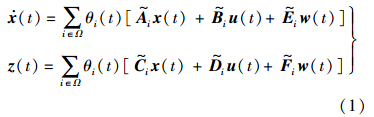

 为适当维数的不确定参数矩阵,满足:
为适当维数的不确定参数矩阵,满足:
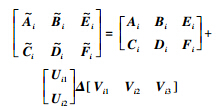
 为平滑切换时间上限.式(1)中的子系统权值满足:
为平滑切换时间上限.式(1)中的子系统权值满足:
 为连续函数,且满足
为连续函数,且满足 表示左极限.以
表示左极限.以 的情况为例,图 1给出了子系统权值在切换指令作用下的变化情况.
的情况为例,图 1给出了子系统权值在切换指令作用下的变化情况.
 |
| 图 1 切换指令下的子系统权值变化过程Fig. 1 Evolution of the subsystem weights under given switching command |
式(1)所示非理想切换系统模型与理想切换系统模型相比更具一般性.实际上,令τk=0,则原系统转化为理想切换系统模型.因此本文针对非理想切换系统的设计方法同样适用于理想切换系统.
理想切换系统模型假设系统模式的切换具有即时性,忽略了模式切换的过渡过程.该假设尽管对某些物理过程是成立的,如:执行机构突发故障[11];但对某些过程却有失准确,如:变体飞行器变换翼形[12].式(1)模型通过引入可渐变的子系统权值θi(t),i∈Ω,解决了对此类非突变物理过程的模型描述问题.
定义1 给定常数γ>0、切换信号σ(t),若式(1)系统在零初始条件下满足:对所有满足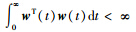 的扰动输入w(t),有
的扰动输入w(t),有 则称γ为系统的L2增益上界.
则称γ为系统的L2增益上界.
考虑如下全状态反馈切换控制律:

非理想切换系统的H∞控制问题即为:设计式(2)所示的状态反馈切换控制器,使其与式(1)非理想切换系统所组成的闭环系统渐近稳定且满足给定的L2增益上界.
定义2 给定切换信号σ(t),以Nσ(t,τ)表示σ(t)在[τ,t)时段内的跳变次数.若存在N0>0和τa>0,使得对任意t≥τ≥0,式Nσ(t,τ)≤N0+(t-τ)/τa成立,则称τa为平均驻留时间.
引理1[13] 给定适当维数矩阵L,M,N,其中L为对称阵,则 对所有ΔTΔ≤I成立,当且仅当存在常数ε>0,使得L+εMMT+ε-1NTN<0.
2 主要结果
对所有ΔTΔ≤I成立,当且仅当存在常数ε>0,使得L+εMMT+ε-1NTN<0.
2 主要结果
在得到式(1)非理想切换系统的H∞控制器设计准则之前,给出有关系统L2增益分析的引理.
引理2 考虑式(1)所示的非理想切换系统,给定常数 ,若存在连续可微的正定函数Vi : Rn→R,i∈Ω,使得对
,若存在连续可微的正定函数Vi : Rn→R,i∈Ω,使得对 ,如下不等式成立:
,如下不等式成立:
 ;且系统平均驻留时间满足:
;且系统平均驻留时间满足:


证明 为式(1)系统构造切换Lyapunov函数V(t)=Vσ(t),以下分别给出系统渐近稳定性与L2增益上界的证明.
1) 渐近稳定性.
令w(t)≡0,由式(3)可得
以Γ+(T1,T2)表示[T1,T2)时段内子系统平滑切换的总耗时,以tl(l∈N+)表示t时刻前的最后一个模式切换时刻,结合式(4)和式(6)有

依式(5)约束,显然有λ>0,从而可知切换系统渐近稳定.
2) L2增益上界.
基于积分不等式理论,由式(3)和式(4)有
考虑零初始条件和式(5)约束条件,进一步有
以[0,∞)为积分域对不等式(7)左端进行积分,得
对不等式(7)右端做相同处理,有
综合式(7)~式(9),得到


给出对子系统指数衰减率的估计,是基于平均驻留时间方法分析切换系统稳定性的前提.式(3)中的λ-和λ+即为对子系统能量函数Vi(t)指数敛散速率的估计.对于实际物理系统,其控制器与对象的模式在绝大部分时间内处于同步状态,所以应保证该状态下系统渐近稳定,即λ->0;对于对象平滑切换所导致的模式异步情况,考虑到其持续时间较短,因此可适当放宽对该状态下稳定性的要求,即λ+<λ-.
基于引理2与线性矩阵不等式技巧,非理想切换系统的H∞控制器设计准则由以下定理给出.为方便定理推导,对任意矩阵M,记He(M)=M+MT.
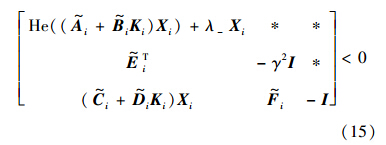
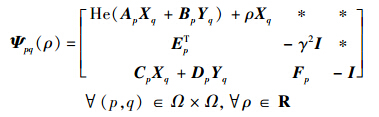
定理1 考虑式(1)所示的非理想切换系统,给定常数,若存在适当维数矩阵Xi>0,Yi和实数εi,i∈Ω,使得对任意(i,j)∈Ω×Ω,i≠j,如下不等式成立:

证明 将式(13)代入式(10)并进行Schur补变换,得到

 0,经整理即为
0,经整理即为
构造正定函数:

由式(15)容易得到

将以上针对式(10)的推导应用于式(11),可得
 另外,对不等式(12)进行两次Schur补变换得到
另外,对不等式(12)进行两次Schur补变换得到 综上,依引理2可知定理1结论成立. 证毕
综上,依引理2可知定理1结论成立. 证毕
需要指出,常数λ+取值的正负分别对应于闭环系统Lyapunov函数在系统模式切换过程中收敛和发散的情况.因此,在应用定理1进行控制综合时,尽管减小λ+可提高不等式(12)的可解性,但对于强调可靠性和安全性的任务关键系统(如飞行控制系统)而言,应采用尽可能大的λ+值,以提高闭环系统的稳定裕度.
将式(1)不确定性系统模型中的Ui1,Ui2,Vi1,Vi2,Vi3(i∈Ω)置为零矩阵,则由定理1容易得到如下针对确定性系统的H∞控制器设计准则.
推论1 考虑式(1)非理想切换系统无参数不确定性的情况,给定常数,若存在适当维数矩阵Xi>0和Yi,i∈Ω,使得对任意(i,j)∈Ω×Ω,i≠j,式(12)和如下不等式成立:
变体无人机Teledyne Ryan BQM-34 “Firebee”是美国NextGen Aeronautics公司设计的一款变体无人技术验证机,在飞行过程中能够依任务模式要求进行变形.Firebee机翼后掠角χ的变化范围为15°~60°,平均气动弦长、展长和机翼面积等参量随后掠角连续变化,完整的气动数据表参见文献[14].
考虑变体飞行器在Ω={1,2,3,4}4个工作模式之间的切换,各模式分别对应于机翼后掠角χ为15°,30°,45°和60°的情况.不失一般性,仅考虑飞行器的纵向短周期运动,基于各工作模式下的小扰动线性模型得到如下非理想切换系统模型:

变体飞行器跟踪控制问题可表述为,设计切换控制器,使系统参数Ap,i和Bp,i在±20%的摄动下,满足如下设计要求:
1) 闭环系统渐近稳定;
2) 飞行器迎角无差跟踪参考输入r(t),即
3) 闭环系统按如下指标具有最优性能:
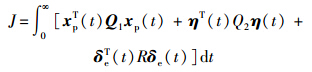
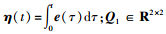 半正定矩阵;Q2为非负实数;R为正实数.
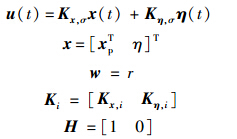
半正定矩阵;Q2为非负实数;R为正实数.为实现无差跟踪,在控制综合时引入偏差积分项η,得到如下控制律[15]:
令
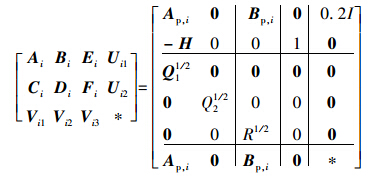
给定设计参数:λ-=2,λ+=0,μ=2,τM=3 s和τa=20 s,基于Matlab的YALMIP工具箱求取保证定理1式(10)~式(12) 可解的γ最小值,得到如下计算结果:
在上述设计条件下,分别将基于定理1和推论1得到的切换控制器应用于变体飞行器的迎角跟踪控制,通过对比两者的时域仿真曲线,验证定理1设计方法的优越性.
图 2所示为机翼变形指令及实际的后掠角响应曲线.显然,实际的后掠角未能理想地复现变形指令,而是平滑地过渡到给定的角度.
 |
| 图 2 机翼后掠角变化曲线 Fig. 2 Trajectory of the sweep angle |
图 3和图 4分别给出上述变形过程中基于推论1和定理1控制器的迎角跟踪曲线.
 |
| 图 3 基于推论1的迎角跟踪曲线 Fig. 3 Trajectory of the angle of attack with respect to Corollary 1 |
 |
| 图 4 基于定理1的迎角跟踪曲线 Fig. 4 Trajectory of the angle of attack with respect to Theorem 1 |
由仿真结果可见,所得闭环系统均可实现对迎角指令的精确跟踪.但对于参数不确定性为±20%和无不确定3种情况,基于定理1的闭环响应曲线更趋于一致,体现出较强的鲁棒性. 4 结 论
针对一类具有平滑切换特性的不确定切换系统,基于平均驻留时间方法与积分不等式理论给出其鲁棒H∞切换控制器的LMI设计准则.
1) 由于考虑了对象模式切换的非即时性,且采用常规的L2增益指标评价系统的扰动抑制水平,本文推广了现有的切换系统理论结果,增强了切换系统方法的工程适用性.
2) 对变体飞行器的应用实例表明:附加的平均驻留时间约束在实际工况中容易得到满足,且所得闭环控制系统具有良好的鲁棒稳定性与跟踪性能.
| [1] | Lin H,Antsaklis P J.Stability and stabilizability of switched linear systems: a survey of recent results[J].IEEE Transactions on Automatic Control,2009,54(2):308-322 |
| Click to display the text | |
| [2] | Sun Z D,Ge S S.Analysis and synthesis of switched linear control systems[J].Automatica,2005,41(2):181-195 |
| Click to display the text | |
| [3] | Zhang W,Hou Y Z,Liu X B,et al.Switched control of three-phase voltage source PWM rectifier under a wide-range rapidly varying active load[J].IEEE Transactions on Power Electronics,2012,27(2):881-889 |
| Click to display the text | |
| [4] | Lu Q G,Zhang L X,Shi P,et al.Control design for a hypersonic aircraft using a switched linear parameter-varying system approach[J].Proceedings of the Institution of Mechanical Engineers,Part I:Journal of Systems and Control Engineering,2012,227(1):85-95 |
| [5] | Huang X Y,Wang Q,Wang Y L,et al.Adaptive augmentation of gain-scheduled controller for aerospace vehicles[J].Journal of Systems Engineering and Electronics,2013,24(2):272-280 |
| Click to display the text | |
| [6] | Huang Y Q,Sun C Y,Qian C S,et al.Non-fragile switching tracking control for a flexible air-breathing hypersonic vehicle based on polytopic LPV model[J].Chinese Journal of Aeronautics,2013,26(4):948-959 |
| Click to display the text | |
| [7] | Lian J,Feng Z,Shi P.Robust H∞ filtering for a class of uncertain stochastic hybrid neutral systems with time-varying delay[J].International Journal of Adaptive Control and Signal Processing,2013,27(6):462-477 |
| Click to display the text | |
| [8] | Shi S H,Zhang Q L,Yuan Z H.Exponential stability and L2-gain analysis for a class of faulty systems[J].International Journal of System Science,2011,42(3):377-387 |
| Click to display the text | |
| [9] | Zhang L X,Boukas E K,Shi P,et al.A μ-dependent approach to H∞ control of uncertain switched linear systems with average dwell time[J].Optimal Control Applications and Methods,2011,32(1):15-27 |
| Click to display the text | |
| [10] | Xiang W M,Xiao J.Discussion on “stability,l2-gain and asynchronous H∞ control of discrete-time switched systems with average dwell time”[J].IEEE Transactions on Automatic Control,2012,57(12):3259-3261 |
| Click to display the text | |
| [11] | Boskovic J D,Jackson J A,Mehra R K,et al.Multiple-model adaptive fault-tolerant control of a planetary lander[J].Journal of Guidance,Control and Dynamics,2009,32(6):1812-1826 |
| Click to display the text | |
| [12] | Seigler T M,Neal D A,Bae J S,et al.Modeling and flight control of large-scale morphing aircraft[J].Journal of Aircraft,2007,44(4):1077-1087 |
| Click to display the text | |
| [13] | Khargonekar P P,Petersen I R,Zhou K M.Robust stabilization of uncertain linear systems:quadratic stabilization and H∞ control theory[J].IEEE Transactions on Automatic Control,1990,35(3):356-361 |
| Click to display the text | |
| [14] | Seigler T M.Dynamics and control of morphing aircraft[D].Blacksburg:Virginia Polytechnic Institute and State University,2005 |
| [15] | Liao F,Wang J L,Yang G H.Reliable robust flight tracking control: an LMI approach[J].IEEE Transaction on Control Systems Technology,2002,10(1):76-89 |
| Click to display the text |